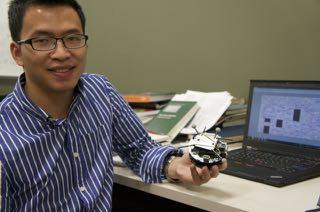
Multi-Robot Systems. Crop#Watering#Robots# (b) Crop irrigation. Mac Schwager Assistant Professor Aeronautics and Astronautics Stanford University
|
|
|
- Agnes Walton
- 5 years ago
- Views:
Transcription
 Crop irrigation Mac Schwager Assistant Professor Aeronautics and Astronautics Stanford University (c) Forest fungus control April 19, 2016 Platform Lab Seminar 1")
1 Multi-Robot Systems Monitoring and Controlling Large-Scale Phenomena Crop#Watering#Robots# An&'fungus#Spraying#UAVs# Oil#Vacuuming#Autonomous#Boats# (a) Oil spill clean up (b) Crop irrigation Mac Schwager Assistant Professor Aeronautics and Astronautics Stanford University (c) Forest fungus control April 19, 2016 Platform Lab Seminar 1





2 Multi-Robot Systems Large scale environment Actuation Communication Sensing Distributed Computation April 19, 2016 Platform Lab Seminar 2





3 Nature is Distributed Morphogenesis Herding Flocking Swarming Human group dynamics Cities and human institutions April 19, 2016 Platform Lab Seminar 3
4 Prototypical Application Deployment and coverage Adaptive sampling Self maintenance Environmental estimation Model learning/ system ID Environmental control April 19, 2016 Platform Lab Seminar 4


 Crop irrigation")

5 Other Application Areas Crop#Watering#Robots# An&'fungus#Spraying#UAVs# Oil#Vacuuming#Autonomous#Boats# Chemical (a) Oil spill clean up up Agriculture (b) Crop irrigation Infestation (c) Forest funguscontrol control Disaster relief Urban surveillance Transportation systems April 19, 2016 Platform Lab Seminar 5





6 Multi-robot Systems Lab MSL$ April 19, 2016 Platform Lab Seminar 6






7 Multi-robot Systems Lab MSL$ Motion capture system Flying Arena, 10m x 5m x 3m Floor projection system Robot fleet April 19, 2016 Platform Lab Seminar 7
8 April 19, 2016 Platform Lab Seminar 8
9 Multi-robot Systems Research Deployment and coverage Coordinated agile maneuvers Model learning/ System ID Active estimation with guarantees Neighbor trust adversaries Multi- Robot Systems Active 3D vision and control Multi-robot manipulation Multi-robot herding Persistent monitoring April 19, 2016 Platform Lab Seminar 9

10 Multi-robot Systems Research Deployment and coverage Coordinated agile maneuvers Model learning/ System ID Active estimation with guarantees Neighbor trust adversaries Multi- Robot Systems Active 3D vision and control Multi-robot manipulation Multi-robot herding Persistent monitoring April 19, 2016 Platform Lab Seminar 10
11 Deployment and Coverage April 19, 2016 Platform Lab Seminar 11
:154-164. L. C. A. Pimenta, V. Kumar, R. C. Mesquita, G. A. S. Pereira.")
12 Existing Methods Geometric: J. Cortes, S. Martinez, T. Karatas, F. Bullo. Coverage control for mobile sensing networks. IEEE TRA, 20(2): , A. Arsie, E. Frazzoli. Efficient routing of multiple vehicles with no explicit communications. IJRNC, 18(2): L. C. A. Pimenta, V. Kumar, R. C. Mesquita, G. A. S. Pereira. Sensing and coverage for a network of heterogeneous robots, CDC 08. M. Schwager, J.-J. Slotine, D. Rus. Decentralized, Adaptive Coverage Control for Networked ROBots. IJRR, 28(3): , Probabilistic: W. Li, C. G. Cassandras. Distributed cooperative coverage control of sensor networks, CDC 05. M. L. Hernandez, T. Kirubarajan y. Bar-Shalom. Multisensor resource deployment using posterior Cramer-Raobounds. IEEE TAES 40(2): , M. Pavone, S. L. Smith, F. Bullo, E. Frazzoli. Dynamics multi-vehicle routing with multiple classes of demands, ACC 09. Potential Fields: D. H. Kim, H. Wang, and S. Shin. Decentralized control of autonomous swarm systems using artificial potential functions: analytical design guidelines, JIRS, 45(4): , A. Howard, M. J. Mataric, G. S. Sukhatme. Mobile sensor network deployment using potential fields, DARS 02. V. Gazi, K. M. Passino. A class of repulsion/atteraction forces for stable swarm aggregations, IJC, 77(18): , April 19, 2016 Platform Lab Seminar 12

13 Deployment Optimization n robots in R 2 H(p 1,...,p n ) ṗ k H i = u i (t) ph i Gradient Theorem: Controller: Robots converge to a local minimum of the cost function. point in R 2n M. Schwager, D. Rus and J. J. Slotine, Unifying Geometric, Probabilistic, and Potential Field Approaches to Multi-Robot Deployment, International Journal of Robotics Research, March, 2011, vol. 30, no. 3. April 19, 2016 Platform Lab Seminar 13
14 Deployment of a Flying Camera Network M. Schwager, B. Julian, M. Angermann and D. Rus, Proceedings of the IEEE, M. Schwager, B. Julian and D. Rus, In Proceedings of the International Conference on Robotics and Automation (ICRA), April 19, 2016 Platform Lab Seminar 14
15 Sensor Cost from Optics camera one pixel height area/pixel From optics and geometry: field of view April 19, 2016 Platform Lab Seminar 15
16 Coverage Cost Function Combined cost for multiple cameras prior area/pixel Cost function: April 19, 2016 Platform Lab Seminar 16
17 Gradient Based Controller Controller: Components: Lateral Component: Move inside Q Move away from neighbors April 19, 2016 Platform Lab Seminar 17
18 Gradient Based Controller Vertical Component: Move up to see more of Q Move down away from neighbors Move down to see Q better April 19, 2016 Platform Lab Seminar 18
19 Convergence LaSalle s invariance principle Trajectories are bounded autonomous and locally Lipschitz Time derivative of non-increasing Therefore converges to largest invariant set where which implies April 19, 2016 Platform Lab Seminar 19
20 April 19, 2016 Platform Lab Seminar 20

21 April 19, 2016 Platform Lab Seminar 21


22 Harvard Forest April 19, 2016 Platform Lab Seminar 22
23 April 19, 2016 Platform Lab Seminar 23
24 Simulation Results x April 19, 2016 Platform Lab Seminar 24
25 April 19, 2016 Platform Lab Seminar 25

26 Five Quadrotors Landing Autonomously April 19, 2016 Platform Lab Seminar 26

27 Forest Reconstruction April 19, 2016 Platform Lab Seminar 27
28 Multi-robot Systems Research Deployment and coverage Coordinated agile maneuvers Model learning/ System ID Active estimation with guarantees Neighbor trust adversaries Multi- Robot Systems Active 3D vision and control Multi-robot manipulation Multi-robot herding Persistent monitoring April 19, 2016 Platform Lab Seminar 28
29 Multi-robot Systems Research Deployment and coverage Coordinated agile maneuvers Model learning/ System ID Active estimation with guarantees Neighbor trust adversaries Multi- Robot Systems Active 3D vision and control Multi-robot manipulation Multi-robot herding Persistent monitoring April 19, 2016 Platform Lab Seminar 29


30 Coordinated Agile Maneuvers Dingjiang Zhou April 19, 2016 Platform Lab Seminar 30
 April 19, 2016 Platform Lab Seminar")
31 Dealing with Dynamics ẋ = f(x, u(t)) ṗ = u(t) April 19, 2016 Platform Lab Seminar 31
 se(3) Potentially difficult control and planning problem April 19, 2016 Platform Lab")
32 Quadrotor Dynamics Velocity Angular Velocity Position Orientation v = qe m Rf ze 3 = J 1 J 1 J ṗ = v Ṙ = R x =(v,, p, R) 12 dimensional state space, 4 dimensional input space Nonlinear dynamics Non-Euclidean, evolve on SE(3) se(3) Potentially difficult control and planning problem April 19, 2016 Platform Lab Seminar 32
33 Trajectory Planning Desired trajectory x(t) How can we ensure that ẋ = f(x, u(t))? For what control input trajectory u(t) will this be true? April 19, 2016 Platform Lab Seminar 33
34 Differential Flatness A small miracle: quadrotor dynamics are differentially flat x = (,,..., (q) ) State trajectory x(t) planned flat output trajectory (t) (t) =(p(t), (t)) u = (,,..., (q) ) Input trajectory u(t) April 19, 2016 Platform Lab Seminar 34
35 Related Work Differential Flatness Theory Fliess, Levine, Martin, Rouchon, IJC Fliess, Levine, Martin, Rouchon, TCA Martin, Murray, Rouchon, CDC Martin, Murray, and Rouchon, Technical report, Caltech, CDS Richard M Murray. Optimization-based control. Caltech, Differential Flatness for Quadrotors Mellinger, Kumar, ICRA 2011 Mellinger, Michael, Kumar, IJRR 2012 Zhou, Schwager, ICRA Zhou, Schwager, ICRA Control Assuming Single Integrator Agents Olfati-Saber and Murray, TAC Jadbabaie, Lin, and Morse, TAC Cortes, Martinez, Karatas, and Bullo, TRO Zavlanos and Pappas, TRO Van den Berg, Lin, and Manocha, ICRA Schwager, Julian, Angermann, and Rus, Proc. IEEE Reynolds, Computer Graphics, Dimarogonas and Johansson, ICRA Ayanian and Kumar, TRO Habets and van Schuppen, Automatica April 19, 2016 Platform Lab Seminar 35
36 Differential Flatness A small miracle: quadrotor dynamics are differentially flat x = (,,..., (q) ) State trajectory x(t) planned flat output trajectory (t) (t) =(p(t), (t)) u = (,,..., (q) ) Input trajectory u(t) April 19, 2016 Platform Lab Seminar 36


 p(t), (t) u")
 Differential")
")
 x(t) April")
37 Trajectory Following Control Flat output trajectory u ff (t) p(t), (t) u fb (t) ẋ = f(x, u) Differential Flatness Pipeline SE(3) controller x d (t) x(t) April 19, 2016 Platform Lab Seminar 37

38 April 19, 2016 Platform Lab Seminar 38
39 Vector Field Following We would like to deal with kinematic points in a vector field. We have: We want: ẋ = f(x, u) u = (p,...,... x d = (p,...,... p ) p ) u(p) = (p,...,... p (p)) x d (p) = (p,...,... p (p)) ṗ = v(p) p = v(p) T ṗ = v(p) T v(p). p (k) (k 1) = v(p)p Zhou, Schwager, ICRA April 19, 2016 Platform Lab Seminar 39

 = (p,.")

 ṗ controller =")
p (k 1) x(t) ẋ = f(x,")
 Back to our")

40 Multi-Robot Control n copies Vector Field Differential Derivatives Flatness u(p) = (p,...,... p (p)) u ff (t) Differential Flatness Pipeline x d (t) Vector Field SE(3) ṗ controller = v(p). u fb (t) p (k) = v(p)p (k 1) x(t) ẋ = f(x, u) ẋ = f(x, u) ṗ i = v(p) 1,...,p n ) Back to our kinematic multi-robot system. Zhou, Schwager, ICRA April 19, 2016 Platform Lab Seminar 40

41 April 19, 2016 Platform Lab Seminar 41
42 Virtual Rigid Body (VRB) r 1 Plan 6DoF trajectory for VRB p vrb (t),r vrb (t) r 3 VRB r 2 Multi-robot Formation = {r 1,...,r n } Flat output trajectories World p vrb (t),r vrb (t) p(t) i = p vrb (t)+r vrb (t)r i i(t) arbitrary Zhou, Schwager, ICRA April 19, 2016 Platform Lab Seminar 42

43 Formations and Transformations Formation A A Transformation B A VRB trajectory Formation B B April 19, 2016 Platform Lab Seminar 43

44 April 19, 2016 Platform Lab Seminar 44




45 VRB for Human Swarm Interface user input ẋ = f(x, u) chosen dynamics VRB user driven trajectory ABC scalable swarm trajectory April 19, 2016 Platform Lab Seminar 45

46 Nov 6, 2015 Grad Happy Hour 46
47 Multi-robot Systems Research Deployment and coverage Coordinated agile maneuvers Model learning/ System ID Active estimation with guarantees Neighbor trust adversaries Multi- Robot Systems Active 3D vision and control Multi-robot manipulation Multi-robot herding Persistent monitoring April 19, 2016 Platform Lab Seminar 47



48 My Approach Provable distributed control algorithms Multi-robot experiments Theoretical tools Control theory Estimation, filtering, machine learning Optimization April 19, 2016 Platform Lab Seminar 48

49 Current Work Cloud Robotics Local low level control Centralized computation in the cloud Using cell phone and WiFi networks April 19, 2016 Platform Lab Seminar 49






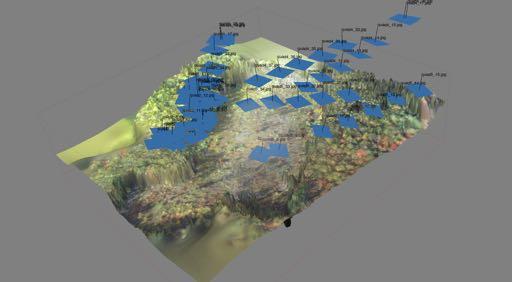

50 Current Work Active 3D Forest Modeling UAV$Surveillance$Mission$ Nov 6, 2015 Grad Happy Hour 50



51 Current Work Intelligent Controlled Vision Eric Cristofalo 3D Printed Forest Model Structure from Motion Reconstruction Nov 6, 2015 Grad Happy Hour 51
52 Summary Multi-robot Systems Coverage with cameras Virtual Rigid Bodies for agile coordination Multi-robot systems will fundamentally change the way we interact with the world at large scales April 19, 2016 Platform Lab Seminar 52


53 Thanks! My Collaborators: Prof. Daniela Rus, MIT Prof. Vijay Kumar, UPenn Prof. Mark Friedl, BU Dr. Josh Gray, BU Dr. Brian Julian, Google My Funding Sources: April 19, 2016 Platform Lab Seminar 53
54 Summary Multi-robot Systems Coverage with cameras Virtual Rigid Bodies for agile coordination Multi-robot systems will fundamentally change the way we interact with the world at large scales April 19, 2016 Platform Lab Seminar 54
INTRODUCTION TO ROBOTICS
 10/12/2018 Andrea Calanca - Altair Lab 1 INTRODUCTION TO ROBOTICS Andrea Calanca 10/12/2018 Andrea Calanca - Altair Lab 2 About Myself Mail: andrea.calanca@univr.it Affiliation: Altair Robotics Lab, University
10/12/2018 Andrea Calanca - Altair Lab 1 INTRODUCTION TO ROBOTICS Andrea Calanca 10/12/2018 Andrea Calanca - Altair Lab 2 About Myself Mail: andrea.calanca@univr.it Affiliation: Altair Robotics Lab, University
A Forest Fire Warning Method Based on Fire Dangerous Rating Dan Wang 1, a, Lei Xu 1, b*, Yuanyuan Zhou 1, c, Zhifu Gao 1, d
 International Conference on Applied Science and Engineering Innovation (ASEI 2015) A Forest Fire Warning Method Based on Fire Dangerous Rating Dan Wang 1, a, Lei Xu 1, b*, Yuanyuan Zhou 1, c, Zhifu Gao
International Conference on Applied Science and Engineering Innovation (ASEI 2015) A Forest Fire Warning Method Based on Fire Dangerous Rating Dan Wang 1, a, Lei Xu 1, b*, Yuanyuan Zhou 1, c, Zhifu Gao
MATLAB & Simulink for Cyber Physical Systems
 MATLAB & Simulink for Cyber Physical Systems Sumit Tandon Senior Customer Success Manager, MathWorks 2017 The MathWorks, Inc. 1 Agenda Intro to MATLAB and Simulink What, where, who, how, quick demos Intro
MATLAB & Simulink for Cyber Physical Systems Sumit Tandon Senior Customer Success Manager, MathWorks 2017 The MathWorks, Inc. 1 Agenda Intro to MATLAB and Simulink What, where, who, how, quick demos Intro
Totally Wireless Video Security
 Totally Wireless Video Security Traditional Video Surveillance ($50,000+) vs. Event-Based Videofied Solution ($2,500) Executive Summary: Totally Wireless Video Security has been effective but cost and
Totally Wireless Video Security Traditional Video Surveillance ($50,000+) vs. Event-Based Videofied Solution ($2,500) Executive Summary: Totally Wireless Video Security has been effective but cost and
Developing a railway station safety control automation system
 Developing a railway station safety control automation system Sangjae LEE a, Youngseok SEO b, Donghyun KIM c a,b,c Research Institute, Korea Railroad Corp., Daejeon, 240, Jungangro, South Korea a E-mail:
Developing a railway station safety control automation system Sangjae LEE a, Youngseok SEO b, Donghyun KIM c a,b,c Research Institute, Korea Railroad Corp., Daejeon, 240, Jungangro, South Korea a E-mail:
SMART EMERGENCY RESPONSE SYSTEM Ankitha Pille (Grad no. 5)
") SMART EMERGENCY RESPONSE SYSTEM Ankitha Pille (Grad no. 5) SMART BUILDING? Comprises of different processes controlling a specific operation in a building. Security cameras, fire alarms, doors, ventilation
SMART EMERGENCY RESPONSE SYSTEM Ankitha Pille (Grad no. 5) SMART BUILDING? Comprises of different processes controlling a specific operation in a building. Security cameras, fire alarms, doors, ventilation
Smart Building using IBM Watson
 Smart Building using IBM Watson K. Vinay Kumar, M. Tech, Associate Professor Department of Computer science and N. Harshitha, K. Roopavani, K. Shyam Sunder, Abstract: Reducing electrical energy consumption
Smart Building using IBM Watson K. Vinay Kumar, M. Tech, Associate Professor Department of Computer science and N. Harshitha, K. Roopavani, K. Shyam Sunder, Abstract: Reducing electrical energy consumption
The Mode of Urban Renewal Base on the Smart City Theory under the Background of New Urbanization
 Frontiers of Engineering Management DOI 10.15302/J-FEM-2015035 ENGINEERING MANAGEMENT THEORIES AND METHODOLOGIES Yi-hua Mao, Hong-yu Li, Qin-rui Xu The Mode of Urban Renewal Base on the Smart City Theory
Frontiers of Engineering Management DOI 10.15302/J-FEM-2015035 ENGINEERING MANAGEMENT THEORIES AND METHODOLOGIES Yi-hua Mao, Hong-yu Li, Qin-rui Xu The Mode of Urban Renewal Base on the Smart City Theory
DESIGN OF A CEILING GLASS INSTALLATION ROBOT
 24th International Symposium on on Automation & Robotics in in Construction (ISARC 2007) Construction Automation Group, I.I.T. Madras DESIGN OF A CEILING GLASS INSTALLATION ROBOT Seungyeol Lee Dept. of
24th International Symposium on on Automation & Robotics in in Construction (ISARC 2007) Construction Automation Group, I.I.T. Madras DESIGN OF A CEILING GLASS INSTALLATION ROBOT Seungyeol Lee Dept. of
Duos Technologies. Intelligent Railcar Inspection Portal rip. Arco de inspección
 Duos Technologies Intelligent Railcar Inspection Portal rip Arco de inspección Railcar Inspection Practices Inspection practices require an inspector to visually inspect the mechanical components on both
Duos Technologies Intelligent Railcar Inspection Portal rip Arco de inspección Railcar Inspection Practices Inspection practices require an inspector to visually inspect the mechanical components on both
Video Smoke Detection using Deep Domain Adaptation Enhanced with Synthetic Smoke Images
 Video Smoke Detection using Deep Domain Adaptation Enhanced with Synthetic Smoke Images Gao Xu, Qixing Zhang, Gaohua Lin, Jinjun Wang, Yongming Zhang State Key Laboratory of Fire Science, University of
Video Smoke Detection using Deep Domain Adaptation Enhanced with Synthetic Smoke Images Gao Xu, Qixing Zhang, Gaohua Lin, Jinjun Wang, Yongming Zhang State Key Laboratory of Fire Science, University of
Sensor Network Design Technique for Monitoring Railroad Structures
 2016 1 st International Workshop on Structural Health Monitoring for Railway Systems (IWSHM-RS 2016) ISBN: 978-1-60595-371-7 Sensor Network Design Technique for Monitoring Railroad Structures Zengye Ju
2016 1 st International Workshop on Structural Health Monitoring for Railway Systems (IWSHM-RS 2016) ISBN: 978-1-60595-371-7 Sensor Network Design Technique for Monitoring Railroad Structures Zengye Ju
Analysis of Triangle Heating Technique using High Frequency Induction Heating in Forming Process of Steel Plate
 Analysis of Triangle Heating Technique using High Frequency Induction Heating in Forming Process of Steel Plate KEYWORDS: Steel-plate forming, Induction heating, Triangle heating, Transverse shrinkage,
Analysis of Triangle Heating Technique using High Frequency Induction Heating in Forming Process of Steel Plate KEYWORDS: Steel-plate forming, Induction heating, Triangle heating, Transverse shrinkage,
Updated Leak Detection & Location Technology
 Updated Leak Detection & Location Technology Paul D. Wehnert p.wehnert@heathus.com About Heath Consultants Incorporated Established in 1933 3 rd generation family/ woman owned Over 1,700 employees Manufacturer
Updated Leak Detection & Location Technology Paul D. Wehnert p.wehnert@heathus.com About Heath Consultants Incorporated Established in 1933 3 rd generation family/ woman owned Over 1,700 employees Manufacturer
GMS GRAPHICAL MANAGEMENT SYSTEM
 GMS GRAPHICAL MANAGEMENT SYSTEM 1 GMS Security management system for multi-site organizations. PACOM Graphical Management System (GMS) is the modular client-server application that integrates all of PACOM
GMS GRAPHICAL MANAGEMENT SYSTEM 1 GMS Security management system for multi-site organizations. PACOM Graphical Management System (GMS) is the modular client-server application that integrates all of PACOM
Gardening the smart way. GARDENA smart system. gardena.com
 Gardening the smart way. GARDENA smart system gardena.com Always connected to the garden. With your heart and your smartphone. GARDENA smart system professional garden care with heart, mind and great technology.
Gardening the smart way. GARDENA smart system gardena.com Always connected to the garden. With your heart and your smartphone. GARDENA smart system professional garden care with heart, mind and great technology.
Section d'informatique Section de Systèmes de Communication
 Algebra Algebraic curves and cryptography Cryptography and security Algorithms Advanced algorithms Analytic algorithms Computational complexity Concurrent algorithms Cryptography and security Data visualization
Algebra Algebraic curves and cryptography Cryptography and security Algorithms Advanced algorithms Analytic algorithms Computational complexity Concurrent algorithms Cryptography and security Data visualization
Fire Detection Using Image Processing
 Fire Detection Using Image Processing Ku. R.A.Agrawal ME Student Department of CSE Babasaheb Naik college of Engineering Pusad, India rachanaagrawal90@gmail.com Prof. S.T.Khandare Associate professor Department
Fire Detection Using Image Processing Ku. R.A.Agrawal ME Student Department of CSE Babasaheb Naik college of Engineering Pusad, India rachanaagrawal90@gmail.com Prof. S.T.Khandare Associate professor Department
Intrusion Detection System: Facts, Challenges and Futures. By Gina Tjhai 13 th March 2007 Network Research Group
 Intrusion Detection System: Facts, Challenges and Futures By Gina Tjhai 13 th March 2007 Network Research Group 1 Overview Introduction Challenges of current IDS Potential solutions Alarm Correlation Existing
Intrusion Detection System: Facts, Challenges and Futures By Gina Tjhai 13 th March 2007 Network Research Group 1 Overview Introduction Challenges of current IDS Potential solutions Alarm Correlation Existing
An improved Algorithm of Generating Network Intrusion Detector Li Ma 1, a, Yan Chen 1, b
 An improved Algorithm of Generating Network Intrusion Detector Li Ma 1, a, Yan Chen 1, b 1 Department of Information Engineering Guilin University of Aerospace Technology, Guilin China a E-mail: woshiml@sina.com,
An improved Algorithm of Generating Network Intrusion Detector Li Ma 1, a, Yan Chen 1, b 1 Department of Information Engineering Guilin University of Aerospace Technology, Guilin China a E-mail: woshiml@sina.com,
2013 Honeywell Users Group EMEA. Adrian Fielding Security from Day One
 2013 Honeywell Users Group EMEA Adrian Fielding Security from Day One 1 2 Safety Moment Agenda Experion Industrial Security Integration of Security Layers Introduction to Digital Video Manager Console
2013 Honeywell Users Group EMEA Adrian Fielding Security from Day One 1 2 Safety Moment Agenda Experion Industrial Security Integration of Security Layers Introduction to Digital Video Manager Console
Smart Sensing and Tracking with Video and Mote Sensor Collaboration
 Smart Sensing and Tracking with Video and Mote Sensor Collaboration Sadiye Guler Founder, intuvision, Inc. www.intuvisiontech.com Timothy Cole Northrop Grumman IT This work is partially supported by DHS
Smart Sensing and Tracking with Video and Mote Sensor Collaboration Sadiye Guler Founder, intuvision, Inc. www.intuvisiontech.com Timothy Cole Northrop Grumman IT This work is partially supported by DHS
Strategic Research Agenda for. High-Altitude Aircraft and Airship. Remote Sensing Applications
 Strategic Research Agenda for USE HAAS High-Altitude Aircraft and Airship Remote Sensing Applications Christian Barbier (CSL, B), Bavo Delauré (VITO, B), Arie Lavie (CTI, Is) 1 OUTLINE 1. The USE HAAS
Strategic Research Agenda for USE HAAS High-Altitude Aircraft and Airship Remote Sensing Applications Christian Barbier (CSL, B), Bavo Delauré (VITO, B), Arie Lavie (CTI, Is) 1 OUTLINE 1. The USE HAAS
Complete FINAL YEAR PROJECT solution + Technical Training 1. ULTRASONIC BASED SAFETY OBSTACLE DETECTION STICK FOR THE BLIND.
 Complete FINAL YEAR PROJECT solution + Technical Training 1. ULTRASONIC BASED SAFETY OBSTACLE DETECTION STICK FOR THE BLIND. 2. ULTRASONIC BASED OBSTACLE DISTANCE MEASUREMENT DEVICE. 3. FINGERPRINT BASED
Complete FINAL YEAR PROJECT solution + Technical Training 1. ULTRASONIC BASED SAFETY OBSTACLE DETECTION STICK FOR THE BLIND. 2. ULTRASONIC BASED OBSTACLE DISTANCE MEASUREMENT DEVICE. 3. FINGERPRINT BASED
Building Occupancy Monitoring Based on Microcontroller and PIR Sensors
 Building Occupancy Monitoring Based on Microcontroller and PIR Sensors Emmanuel Hitiyise, Etienne Ntagwirumugara, William Habarurema, Winfred Ingabire and Geoffrey Gasore Department of Electrical and Electronics
Building Occupancy Monitoring Based on Microcontroller and PIR Sensors Emmanuel Hitiyise, Etienne Ntagwirumugara, William Habarurema, Winfred Ingabire and Geoffrey Gasore Department of Electrical and Electronics
Gas Detection Instrument Based on Wireless Sensor Networks
 Sensors & Transducers 2013 by IFSA http://www.sensorsportal.com Gas Detection Instrument Based on Wireless Sensor Networks 1,2,3 ANSONG FENG, 1 HONG WANG, 2 LIFENG WEI 1 Shenyang Institute of Automation,
Sensors & Transducers 2013 by IFSA http://www.sensorsportal.com Gas Detection Instrument Based on Wireless Sensor Networks 1,2,3 ANSONG FENG, 1 HONG WANG, 2 LIFENG WEI 1 Shenyang Institute of Automation,
AUTOMATIC CABLE SPOOLING for A ROBOTIC VACUUM CLEANER
 AUTOMATIC CABLE SPOOLING for A ROBOTIC VACUUM CLEANER 1 Min-Chie Chiu, 2 Long-Jyi Yeh, and 2 Cheng-Chen Shih 1 Department of Automatic Control Engineering, Chungchou Institute of Technology. 2 Department
AUTOMATIC CABLE SPOOLING for A ROBOTIC VACUUM CLEANER 1 Min-Chie Chiu, 2 Long-Jyi Yeh, and 2 Cheng-Chen Shih 1 Department of Automatic Control Engineering, Chungchou Institute of Technology. 2 Department
REMOTE CONTROL AND MONITORING OF LANDMINES DETECTION ROBOTIC SYSTEM
 REMOTE CONTROL AND MONITORING OF LANDMINES DETECTION ROBOTIC SYSTEM 1 ABDALLAH MOKHTAR, 2 CHOI SEONG JOO, 3 MANAR MOHAISEN 1,2 Department Mechanical Engineering, Korea University of Technology and Education
REMOTE CONTROL AND MONITORING OF LANDMINES DETECTION ROBOTIC SYSTEM 1 ABDALLAH MOKHTAR, 2 CHOI SEONG JOO, 3 MANAR MOHAISEN 1,2 Department Mechanical Engineering, Korea University of Technology and Education
Performance Evaluation and Design Optimization of Refrigerated Display Cabinets Through Fluid Dynamic Analysis
 Purdue University Purdue e-pubs International Refrigeration and Air Conditioning Conference School of Mechanical Engineering 2008 Performance Evaluation and Design Optimization of Refrigerated Display
Purdue University Purdue e-pubs International Refrigeration and Air Conditioning Conference School of Mechanical Engineering 2008 Performance Evaluation and Design Optimization of Refrigerated Display
Compression of Fins pipe and simple Heat pipe Using CFD
 Compression of Fins pipe and simple Heat pipe Using CFD 1. Prof.Bhoodev Mudgal 2. Prof. Gaurav Bhadoriya (e-mail-devmudgal.mudgal@gmail.com) ABSTRACT The aim of this paper is to identify the advantages
Compression of Fins pipe and simple Heat pipe Using CFD 1. Prof.Bhoodev Mudgal 2. Prof. Gaurav Bhadoriya (e-mail-devmudgal.mudgal@gmail.com) ABSTRACT The aim of this paper is to identify the advantages
YOUR SECURITY IS OUR TASK. Systems for an Intelligent Security- and Lighting Network Over IP SMART CITY SAFE CITY
 YOUR SECURITY IS OUR TASK. Systems for an Intelligent Security- and Lighting Network Over IP SMART CITY SAFE CITY Background In General In these days a safe and secure environment represents a greatly
YOUR SECURITY IS OUR TASK. Systems for an Intelligent Security- and Lighting Network Over IP SMART CITY SAFE CITY Background In General In these days a safe and secure environment represents a greatly
Autonomous Waste Sorter Design Project
 Autonomous Waste Sorter Design Project Ahmet Mavus*, Sinem Gozde Defterli**, Erman Cagan Ozdemir*** * Middle East Technical University, Department of Mechanical Engineering, Ankara, 06531 Turkey (e-mail:
Autonomous Waste Sorter Design Project Ahmet Mavus*, Sinem Gozde Defterli**, Erman Cagan Ozdemir*** * Middle East Technical University, Department of Mechanical Engineering, Ankara, 06531 Turkey (e-mail:
Smoke and Fire Detection
 International Journal of Scientific and Research Publications, Volume 4, Issue 7, July 2014 1 Smoke and Fire Detection Dr. (Mrs.) Saylee Gharge *, Sumeet Birla **, Sachin Pandey **, Rishi Dargad **, Rahul
International Journal of Scientific and Research Publications, Volume 4, Issue 7, July 2014 1 Smoke and Fire Detection Dr. (Mrs.) Saylee Gharge *, Sumeet Birla **, Sachin Pandey **, Rishi Dargad **, Rahul
BURGLAR ALARM USING ARDUINO AND PIR SENSOR WITH SMS ALERT Burgoji Santhosh Kumar 1, S.Ramesh 2 1
 BURGLAR ALARM USING ARDUINO AND PIR SENSOR WITH SMS ALERT Burgoji Santhosh Kumar 1, S.Ramesh 2 1 Assistant Professor, Dept of ECE, Anurag Group of Institutions, Telangana, India. 2 Assistant Professor,
BURGLAR ALARM USING ARDUINO AND PIR SENSOR WITH SMS ALERT Burgoji Santhosh Kumar 1, S.Ramesh 2 1 Assistant Professor, Dept of ECE, Anurag Group of Institutions, Telangana, India. 2 Assistant Professor,
DFPC s Toolbox. Colorado Fire Prediction System (CO-FPS)
") DFPC s Toolbox Colorado Fire Prediction System (CO-FPS) Wildfire in Colorado 68% of Colorado s forested lands are under federal jurisdiction The Wildland-Urban Interface in Colorado is currently 1.1 million
DFPC s Toolbox Colorado Fire Prediction System (CO-FPS) Wildfire in Colorado 68% of Colorado s forested lands are under federal jurisdiction The Wildland-Urban Interface in Colorado is currently 1.1 million
MODEL-BASED OPTIMIZATION OF AN INFRARED GAS SENSOR
 MODEL-BASED OPTIMIZATION OF AN INFRARED GAS SENSOR ABSTRACT Ingo Sieber Forschungszentrum Karlsruhe P.O. Box 3640 76021 Karlsruhe Germany sieber@iai.fzk.de Manufacturing test structures of microsensors
MODEL-BASED OPTIMIZATION OF AN INFRARED GAS SENSOR ABSTRACT Ingo Sieber Forschungszentrum Karlsruhe P.O. Box 3640 76021 Karlsruhe Germany sieber@iai.fzk.de Manufacturing test structures of microsensors
Autonomous robots in agricultural field trials
 Agricultural Field Trials Today and Tomorrow University of Hohenheim Stuttgart - 08.-10. October 2007 Arno Ruckelshausen Faculty of Engineering and Computer Science COALA - Competence Center of Applied
Agricultural Field Trials Today and Tomorrow University of Hohenheim Stuttgart - 08.-10. October 2007 Arno Ruckelshausen Faculty of Engineering and Computer Science COALA - Competence Center of Applied
R&D for the improvement of O&M in CSP plants. Dr. Marcelino Sánchez. - November,
 R&D for the improvement of O&M in CSP plants. Dr. Marcelino Sánchez - November, 2015 - í n d i c e 1 Need of R&D for O&M improvement in CSP Plants 2 Current R&D activities in O&M improvement carried out
R&D for the improvement of O&M in CSP plants. Dr. Marcelino Sánchez - November, 2015 - í n d i c e 1 Need of R&D for O&M improvement in CSP Plants 2 Current R&D activities in O&M improvement carried out
Analysis of Oil Pumping in the Hermetic Reciprocating Compressor for Household Refrigerators
 Purdue University Purdue e-pubs International Compressor Engineering Conference School of Mechanical Engineering 2010 Analysis of Oil Pumping in the Hermetic Reciprocating Compressor for Household Refrigerators
Purdue University Purdue e-pubs International Compressor Engineering Conference School of Mechanical Engineering 2010 Analysis of Oil Pumping in the Hermetic Reciprocating Compressor for Household Refrigerators
Siemens installs Desigo building automation integrated solution at DB Schenker
 Siemens installs Desigo building automation integrated solution at DB Schenker Published on 7 Sep 2018 International logistics giant DB Schenker has set benchmarks with its new headquarters in Essen. On
Siemens installs Desigo building automation integrated solution at DB Schenker Published on 7 Sep 2018 International logistics giant DB Schenker has set benchmarks with its new headquarters in Essen. On
Applications of Wireless Sensor Networks (WSN) in Buildings
 in Buildings") Applications of Wireless Sensor Networks (WSN) in Buildings Lu Aye, Priyan Mendis & Tuan Ngo Melbourne School of Engineering Advanced Technologies for Sustainability Workshop September 25-26, 2008 Contents
Applications of Wireless Sensor Networks (WSN) in Buildings Lu Aye, Priyan Mendis & Tuan Ngo Melbourne School of Engineering Advanced Technologies for Sustainability Workshop September 25-26, 2008 Contents
Remote Environment Monitoring & Detection Tribot
 International Refereed Journal of Engineering and Science (IRJES) ISSN (Online) 2319-183X, (Print) 2319-1821 Volume 1, Issue 3(November 2012), PP.01-08 Remote Environment Monitoring & Detection Tribot
International Refereed Journal of Engineering and Science (IRJES) ISSN (Online) 2319-183X, (Print) 2319-1821 Volume 1, Issue 3(November 2012), PP.01-08 Remote Environment Monitoring & Detection Tribot
The Design of MLX90621 Based Intelligent Lighting Control System Hui-jiao Wang*, Meng-meng Liu and Cong-cong Shi
 International Conference on Computer Networks and Communication Technology (CNCT2016) The Design of MLX90621 Based Intelligent Lighting Control System Hui-jiao Wang*, Meng-meng Liu and Cong-cong Shi School
International Conference on Computer Networks and Communication Technology (CNCT2016) The Design of MLX90621 Based Intelligent Lighting Control System Hui-jiao Wang*, Meng-meng Liu and Cong-cong Shi School
HESAI. HS-5000 Drone-Mounted Natural Gas Surveillance System
 HESAI HS-5000 Drone-Mounted Natural Gas Surveillance System Introduction HESAI Hesai partnered with DJI to build the world first drone-mounted natural gas surveillance system HS-5000. This intelligent
HESAI HS-5000 Drone-Mounted Natural Gas Surveillance System Introduction HESAI Hesai partnered with DJI to build the world first drone-mounted natural gas surveillance system HS-5000. This intelligent
Circuits Devices And Systems A First Course In Electrical Engineering 5th Edition
 Circuits Devices And Systems A First Course In Electrical Engineering 5th Edition We have made it easy for you to find a PDF Ebooks without any digging. And by having access to our ebooks online or by
Circuits Devices And Systems A First Course In Electrical Engineering 5th Edition We have made it easy for you to find a PDF Ebooks without any digging. And by having access to our ebooks online or by
Application of two hybrid control methods of expansion valves and vapor injected compression to heat pumps
 AM-4249223-1 - Application of two hybrid control methods of expansion valves and vapor injected compression to heat pumps Christian K. Bach, Graduate Student, Eckhard A. Groll, Reilly Professor, James
AM-4249223-1 - Application of two hybrid control methods of expansion valves and vapor injected compression to heat pumps Christian K. Bach, Graduate Student, Eckhard A. Groll, Reilly Professor, James
Extremum Seeking Control for Energy Optimization of Vapor Compression Systems
 Purdue University Purdue e-pubs International Refrigeration and Air Conditioning Conference School of Mechanical Engineering 2012 Extremum Seeking Control for Energy Optimization of Vapor Compression Systems
Purdue University Purdue e-pubs International Refrigeration and Air Conditioning Conference School of Mechanical Engineering 2012 Extremum Seeking Control for Energy Optimization of Vapor Compression Systems
Complete Security Solution
 Complete Security Solution Intrusion Video Access All-in-one, comprehensive security for premises, property and people Complete Security Solution Tyco s Complete Security Solution provides a comprehensive
Complete Security Solution Intrusion Video Access All-in-one, comprehensive security for premises, property and people Complete Security Solution Tyco s Complete Security Solution provides a comprehensive
Alarm Analysis with Fuzzy Logic and Multilevel Flow Models
 Alarm Analysis with Fuzzy Logic and Multilevel Flow Models Fredrik Dahlstrand Department of Information Technology Lund Institute of Technology Box 118, SE-221 00 Lund, Sweden Phone: +46 46 222 95 10 Fax
Alarm Analysis with Fuzzy Logic and Multilevel Flow Models Fredrik Dahlstrand Department of Information Technology Lund Institute of Technology Box 118, SE-221 00 Lund, Sweden Phone: +46 46 222 95 10 Fax
CFD Analysis of Co-current Spray Dryer with Swirler at Air Inlet
 CFD Analysis of Co-current Spray Dryer with Swirler at Air Inlet Bharath G Wadone #1, Dr. G Manavendra *2 # 1 PG Student: Dept. of Mechanical Engineering, *2 Associate Professor: Dept. of Mechanical Engineering,
CFD Analysis of Co-current Spray Dryer with Swirler at Air Inlet Bharath G Wadone #1, Dr. G Manavendra *2 # 1 PG Student: Dept. of Mechanical Engineering, *2 Associate Professor: Dept. of Mechanical Engineering,
AUTONOMOUS FLOOR CLEANING BOT
 AUTONOMOUS FLOOR CLEANING BOT KUSHAL N L 1, HAMARA CHAUDHURI 2, NIKITHESH H R 3 1,2,3Student, Dept. of Electronics and Communication Engineering, The National Institute of Engineering, Mysuru, Karnataka,
AUTONOMOUS FLOOR CLEANING BOT KUSHAL N L 1, HAMARA CHAUDHURI 2, NIKITHESH H R 3 1,2,3Student, Dept. of Electronics and Communication Engineering, The National Institute of Engineering, Mysuru, Karnataka,
SARVEPALLI RADHAKRISHANAN UNIVERSITY, BHOPAL TIME TABLE EXAMINATION JUNE-2018
 B.E. II SEMESTER (ALL BRANCH) ( Regular & Ex) Time: - 11:00 AM to 02:00 PM 19/06/2018 20/06/2018 21/06/2018 22/06/2018 23/06/2018 Saturday MA111 Mathematics-II CY110 Chemistry EE110 Basic Electrical &
B.E. II SEMESTER (ALL BRANCH) ( Regular & Ex) Time: - 11:00 AM to 02:00 PM 19/06/2018 20/06/2018 21/06/2018 22/06/2018 23/06/2018 Saturday MA111 Mathematics-II CY110 Chemistry EE110 Basic Electrical &
FALCON EYE Land Based Surveillance System
 Land Based Surveillance System SpecOps Group is a global technology innovation leader in security systems and autonomous border protection platforms. SpecOps Group provides a unique autonomous situational
Land Based Surveillance System SpecOps Group is a global technology innovation leader in security systems and autonomous border protection platforms. SpecOps Group provides a unique autonomous situational
Integrating fire-spread and household-level trigger modeling to stage wildfire evacuation warnings
 Integrating fire-spread and household-level trigger modeling to stage wildfire evacuation warnings Dapeng. Li 1, Thomas. J. Cova 1, Philip. E. Dennison 1 1 Department of Geography, University of Utah,
Integrating fire-spread and household-level trigger modeling to stage wildfire evacuation warnings Dapeng. Li 1, Thomas. J. Cova 1, Philip. E. Dennison 1 1 Department of Geography, University of Utah,
Overview. Executive Summary. Solution Description CHAPTER
 CHAPTER 1 Executive Summary In large and complex urban environments, it is critical for decision makers to reduce the time from detection of an incident to response by first responders. Additionally, it
CHAPTER 1 Executive Summary In large and complex urban environments, it is critical for decision makers to reduce the time from detection of an incident to response by first responders. Additionally, it
Computer Models For Fire and Smoke
 Computer Models For Fire and Smoke Model Name: JASMINE Version: 3.1 Classification: Very Short Description: CFD or Field A CFD or field model for predicting consequences of fire to evaluate design issues
Computer Models For Fire and Smoke Model Name: JASMINE Version: 3.1 Classification: Very Short Description: CFD or Field A CFD or field model for predicting consequences of fire to evaluate design issues
Procedia - Social and Behavioral Sciences 195 ( 2015 ) World Conference on Technology, Innovation and Entrepreneurship
 World Conference on Technology, Innovation and Entrepreneurship") Available online at www.sciencedirect.com ScienceDirect Procedia - Social and Behavioral Sciences 195 ( 2015 ) 1846 1850 World Conference on Technology, Innovation and Entrepreneurship Fire Detection Systems
Available online at www.sciencedirect.com ScienceDirect Procedia - Social and Behavioral Sciences 195 ( 2015 ) 1846 1850 World Conference on Technology, Innovation and Entrepreneurship Fire Detection Systems
Video Analytics Technology for Disaster Management and Security Solutions
 FEATURED ARTICLES Disaster Management and Security Solutions for a Safe and Secure Way of Life Video Analytics Technology for Disaster Management and Security Solutions The rising demand for safety and
FEATURED ARTICLES Disaster Management and Security Solutions for a Safe and Secure Way of Life Video Analytics Technology for Disaster Management and Security Solutions The rising demand for safety and
Team Rescue X: Autonomous Firefighting Robot
 Team Rescue X: Autonomous Firefighting Robot Team Members Project Manager: Shervin Haghgouy Parts Manager: Shervin Nikravesh Website Designer: Vincent Thomas Repository Manager: Alexander Camp Report Editor:
Team Rescue X: Autonomous Firefighting Robot Team Members Project Manager: Shervin Haghgouy Parts Manager: Shervin Nikravesh Website Designer: Vincent Thomas Repository Manager: Alexander Camp Report Editor:
Modified geotextile tube a new geotextile tube for optimized retaining efficiency and dewatering rate
 Modified geotextile tube a new geotextile tube for optimized retaining efficiency and dewatering rate Hyeong-Joo Kim 1), Tae-Woong Park 2), Sung-Gil Moon 3), Hyeong-Soo Kim 4), Ri Zhang 5), and *Peter
Modified geotextile tube a new geotextile tube for optimized retaining efficiency and dewatering rate Hyeong-Joo Kim 1), Tae-Woong Park 2), Sung-Gil Moon 3), Hyeong-Soo Kim 4), Ri Zhang 5), and *Peter
Fire Detection System using Matlab
 Fire Detection System using Matlab Chandrakant Shrimantrao 1, Mahesh S K 2, Vivekanand M Bonal 3 1 Fourth Sem M.Tech, 2 Asst. Professor, Appa Institute of Engineering and Technology Karnataka, 3 Head,
Fire Detection System using Matlab Chandrakant Shrimantrao 1, Mahesh S K 2, Vivekanand M Bonal 3 1 Fourth Sem M.Tech, 2 Asst. Professor, Appa Institute of Engineering and Technology Karnataka, 3 Head,
Proxemic Interactions in Ubiquitous Computing Ecologies
 Proxemic Interactions in Ubiquitous Computing Ecologies Figure 1. People, digital devices, and non-digital physical objects in a ubiquitous computing ecology. Nicolai Marquardt Interactions Lab, University
Proxemic Interactions in Ubiquitous Computing Ecologies Figure 1. People, digital devices, and non-digital physical objects in a ubiquitous computing ecology. Nicolai Marquardt Interactions Lab, University
Bringing Smarts to Methane Emissions Detection
 Bringing Smarts to Methane Emissions Detection An Update on the DOE Smart Methane Emissions Project Maria Araujo Manager R&D Southwest Research Institute Background Fugitive emissions from compressors
Bringing Smarts to Methane Emissions Detection An Update on the DOE Smart Methane Emissions Project Maria Araujo Manager R&D Southwest Research Institute Background Fugitive emissions from compressors
Implementation of Auto Car Washing System Using Two Robotic Arms
 Implementation of Auto Car Washing System Using Two Robotic Arms Pranoti Utekar 1, Sayali Naik 2, Monika Wadekar 3, S.G. Watve 4 U.G. Students, Department of Electronics and Telecommunication Engineering,
Implementation of Auto Car Washing System Using Two Robotic Arms Pranoti Utekar 1, Sayali Naik 2, Monika Wadekar 3, S.G. Watve 4 U.G. Students, Department of Electronics and Telecommunication Engineering,
Chapter 1 Introduction
 Chapter 1 Introduction Chapter 1 provides an overview of the fundamental aspects of the industries that influence electronic safety and security (ESS) design. Table of Contents Introduction to Safety
Chapter 1 Introduction Chapter 1 provides an overview of the fundamental aspects of the industries that influence electronic safety and security (ESS) design. Table of Contents Introduction to Safety
VOICE BASED PROJECTS
 ************************************************************************ INNOVATIVE & APPLICATION ORIENTED PROJECTS ON SVSEMBEDDED SYSTEMS (8051/AVR/ARM7/MSP430/RENESAS/ARM cortex M3) ************************************************************************
************************************************************************ INNOVATIVE & APPLICATION ORIENTED PROJECTS ON SVSEMBEDDED SYSTEMS (8051/AVR/ARM7/MSP430/RENESAS/ARM cortex M3) ************************************************************************
YAHYA SALEH. Industrial Engineering Department An-Najah National University Nablus, West Bank, Palestine P.O.Box: 7
 YAHYA SALEH Industrial Engineering Department An-Najah National University Nablus, West Bank, Palestine P.O.Box: 7 Emails:ysaleh@najah.edu ysaleh2010@hotmail.com saleh_yahya@yahoo.com Tel: +970592 301185
YAHYA SALEH Industrial Engineering Department An-Najah National University Nablus, West Bank, Palestine P.O.Box: 7 Emails:ysaleh@najah.edu ysaleh2010@hotmail.com saleh_yahya@yahoo.com Tel: +970592 301185
Unattended d Ground Sensor. Memphis Center for Advanced d Sensors. Alfredo Ramirez Eddie L. Jacobs
 Unattended d Ground Sensor Testing at the University of Memphis Center for Advanced d Sensors William E. White Alfredo Ramirez Eddie L. Jacobs Presentation Overview Introduction Center for Advanced Sensors
Unattended d Ground Sensor Testing at the University of Memphis Center for Advanced d Sensors William E. White Alfredo Ramirez Eddie L. Jacobs Presentation Overview Introduction Center for Advanced Sensors
CASE HISTORY: RETROFIT OF COAL MILL EXHAUST FAN STUDY OF FAN PERFORMANCE AND EROSION
 CASE HISTORY: RETROFIT OF COAL MILL EXHAUST FAN STUDY OF FAN PERFORMANCE AND EROSION David R. Grupp Director of Research Robinson Industries, Inc. 400 Robinson Drive Zelienople, PA 16063 CASE HISTORY:
CASE HISTORY: RETROFIT OF COAL MILL EXHAUST FAN STUDY OF FAN PERFORMANCE AND EROSION David R. Grupp Director of Research Robinson Industries, Inc. 400 Robinson Drive Zelienople, PA 16063 CASE HISTORY:
FIMD: Fine-grained Device-free Motion Detection
 ICPADS 2012 FIMD: Fine-grained Device-free Motion Detection Jiang Xiao, Kaishun Wu, Youwen Yi, Lu Wang, Lionel M. Ni Department of Computer Science and Engineering Hong Kong University of Science and Technology
ICPADS 2012 FIMD: Fine-grained Device-free Motion Detection Jiang Xiao, Kaishun Wu, Youwen Yi, Lu Wang, Lionel M. Ni Department of Computer Science and Engineering Hong Kong University of Science and Technology
The WAVE Plus Instant Notification System for Schools and Colleges
 Instant Notification System for Schools and Colleges Duress alarm has been activated in the School of Engineering! Schools strive to provide a safe environment for students and teachers. In an emergency,
Instant Notification System for Schools and Colleges Duress alarm has been activated in the School of Engineering! Schools strive to provide a safe environment for students and teachers. In an emergency,
ALCATEL-LUCENT OPENTOUCH NOTIFICATION SERVICE IMPROVE REAL-TIME SITUATIONAL AWARENESS AND PERSONAL SAFETY
 ALCATEL-LUCENT OPENTOUCH NOTIFICATION SERVICE IMPROVE REAL-TIME SITUATIONAL AWARENESS AND PERSONAL SAFETY In healthcare, education, high-risk industries and the hospitality sector, you must know immediately
ALCATEL-LUCENT OPENTOUCH NOTIFICATION SERVICE IMPROVE REAL-TIME SITUATIONAL AWARENESS AND PERSONAL SAFETY In healthcare, education, high-risk industries and the hospitality sector, you must know immediately
Towards Environmental Monitoring with Mobile Robots
 Towards Environmental Monitoring with Mobile Robots Marco Trincavelli, Matteo Reggente, Silvia Coradeschi, Amy Loutfi, Hiroshi Ishida and Achim J. Lilienthal Abstract In this paper we present initial experiments
Towards Environmental Monitoring with Mobile Robots Marco Trincavelli, Matteo Reggente, Silvia Coradeschi, Amy Loutfi, Hiroshi Ishida and Achim J. Lilienthal Abstract In this paper we present initial experiments
IJSRD - International Journal for Scientific Research & Development Vol. 3, Issue 01, 2015 ISSN (online):
:") IJSRD - International Journal for Scientific Research & Development Vol. 3, Issue 01, 2015 ISSN (online): 2321-0613 I-Home: Intelligent Home Controlling and Monitoring System using Cloud and Android Himani
IJSRD - International Journal for Scientific Research & Development Vol. 3, Issue 01, 2015 ISSN (online): 2321-0613 I-Home: Intelligent Home Controlling and Monitoring System using Cloud and Android Himani
Dynamic Simulation of Double Pipe Heat Exchanger using MATLAB simulink
 Dynamic Simulation of Double Pipe Heat Exchanger using MATLAB simulink 1 Asoka R.G, 2 Aishwarya N, 3 Rajasekar S and 4 Meyyappan N 1234 Department of Chemical Engineering Sri Venkateswara College of Engineering,
Dynamic Simulation of Double Pipe Heat Exchanger using MATLAB simulink 1 Asoka R.G, 2 Aishwarya N, 3 Rajasekar S and 4 Meyyappan N 1234 Department of Chemical Engineering Sri Venkateswara College of Engineering,
Martin Dekan, František Duchoň, Ladislav Jurišica, Anton Vitko and Andrej Babinec
 Journal of Mechanics Engineering and Automation 3 (2013) 197-202 D DAVID PUBLISHING Martin Dekan, František Duchoň, Ladislav Jurišica, Anton Vitko and Andrej Babinec Institute of Control and Industrial
Journal of Mechanics Engineering and Automation 3 (2013) 197-202 D DAVID PUBLISHING Martin Dekan, František Duchoň, Ladislav Jurišica, Anton Vitko and Andrej Babinec Institute of Control and Industrial
Design of the Fiber-optic Fence Warning System with Distributed Video Real-Time Display Function Qiang-yi YI and Zheng-hong YU *
 2016 International Conference on Artificial Intelligence: Techniques and Applications (AITA 2016) ISBN: 978-1-60595-389-2 Design of the Fiber-optic Fence Warning System with Distributed Video Real-Time
2016 International Conference on Artificial Intelligence: Techniques and Applications (AITA 2016) ISBN: 978-1-60595-389-2 Design of the Fiber-optic Fence Warning System with Distributed Video Real-Time
MODELLING AND OPTIMIZATION OF DIRECT EXPANSION AIR CONDITIONING SYSTEM FOR COMMERCIAL BUILDING ENERGY SAVING
 MODELLING AND OPTIMIZATION OF DIRECT EXPANSION AIR CONDITIONING SYSTEM FOR COMMERCIAL BUILDING ENERGY SAVING V. Vakiloroaya*, J.G. Zhu, and Q.P. Ha School of Electrical, Mechanical and Mechatronic Systems,
MODELLING AND OPTIMIZATION OF DIRECT EXPANSION AIR CONDITIONING SYSTEM FOR COMMERCIAL BUILDING ENERGY SAVING V. Vakiloroaya*, J.G. Zhu, and Q.P. Ha School of Electrical, Mechanical and Mechatronic Systems,
Safety Instrumented Systems The Smart Approach
 Safety Instrumented Systems The Smart Approach The Emerson Approach to Safety More than ever, running your plant productively and safely requires the right technologies and experience. With increasingly
Safety Instrumented Systems The Smart Approach The Emerson Approach to Safety More than ever, running your plant productively and safely requires the right technologies and experience. With increasingly
An Overview of Procedural Fire. How to model procedurally spreading fire
 An Overview of Procedural Fire How to model procedurally spreading fire Table of Contents How to model procedurally spreading fire...1 1. Introduction...3 2. Simulating Fire...4 3. Implementation...5 3.1.
An Overview of Procedural Fire How to model procedurally spreading fire Table of Contents How to model procedurally spreading fire...1 1. Introduction...3 2. Simulating Fire...4 3. Implementation...5 3.1.
Integrating & Synthesizing Data for Perimeter Security Awareness
 Integrating & Synthesizing Data for Perimeter Security Awareness ANSI HSSP Perimeter Security Summit May 17, 2005 Mark Bonatucci Lockheed Martin Transportation & Security Solutions Rockville, MD Phone:
Integrating & Synthesizing Data for Perimeter Security Awareness ANSI HSSP Perimeter Security Summit May 17, 2005 Mark Bonatucci Lockheed Martin Transportation & Security Solutions Rockville, MD Phone:
Experience in developing fire safety science and public safety technology in China: Past, present, and future Weicheng FAN
 Experience in developing fire safety science and public safety technology in China: Past, present, and future Weicheng FAN Institute of Public Safety Research, Tsinghua University State Key Laboratory
Experience in developing fire safety science and public safety technology in China: Past, present, and future Weicheng FAN Institute of Public Safety Research, Tsinghua University State Key Laboratory
VISION BASED AUTOMATIC FIRE PROTECTION SYSTEM USING SPRINKLER
 VISION BASED AUTOMATIC FIRE PROTECTION SYSTEM USING SPRINKLER M. Nandhini, R.Ranjani,R.Srividhya Assistant Professor, Department of Mechatronics Engineering, SRM University, Chennai, Tamilnadu ABSTRACT
VISION BASED AUTOMATIC FIRE PROTECTION SYSTEM USING SPRINKLER M. Nandhini, R.Ranjani,R.Srividhya Assistant Professor, Department of Mechatronics Engineering, SRM University, Chennai, Tamilnadu ABSTRACT
Corporate Presentation
 Corporate Presentation Ontech s Controlled Magnetic Field technology, marks the next generation in the world's security systems, satisfying market demands with innovative new functionality not available
Corporate Presentation Ontech s Controlled Magnetic Field technology, marks the next generation in the world's security systems, satisfying market demands with innovative new functionality not available
Negative Selection Algorithm for Aircraft Fault Detection
 Negative Selection Algorithm for Aircraft Fault Detection D. Dasgupta 1, K. KrishnaKumar 2, D. Wong, M. Berry 1 Division of Computer Science, University of Memphis Memphis, TN 2 Computational Sciences
Negative Selection Algorithm for Aircraft Fault Detection D. Dasgupta 1, K. KrishnaKumar 2, D. Wong, M. Berry 1 Division of Computer Science, University of Memphis Memphis, TN 2 Computational Sciences
Design and Analysis of Safety Critical Systems
 Design and Analysis of Safety Critical Systems Peter Seiler and Bin Hu Department of Aerospace Engineering & Mechanics University of Minnesota September 30, 2013 Uninhabited Aerial Systems (UAS) Flight
Design and Analysis of Safety Critical Systems Peter Seiler and Bin Hu Department of Aerospace Engineering & Mechanics University of Minnesota September 30, 2013 Uninhabited Aerial Systems (UAS) Flight
FlameRanger. Revolutionary Firefighting Robot.
 www.flameranger.com sales@unifire.com FlameRanger Revolutionary Firefighting Robot Introducing the first-of-its kind, fully automatic fire detection & high flow extinguishing robotic nozzle system. Welcome
www.flameranger.com sales@unifire.com FlameRanger Revolutionary Firefighting Robot Introducing the first-of-its kind, fully automatic fire detection & high flow extinguishing robotic nozzle system. Welcome
Smart City Governance URBIS Solutions. David Ludlow, Assoc. Professor European Smart Cities University of the West of England, Bristol
 Smart City Governance URBIS Solutions David Ludlow, Assoc. Professor European Smart Cities University of the West of England, Bristol Integrated smart city model Smart Mobility Services focused on decreasing
Smart City Governance URBIS Solutions David Ludlow, Assoc. Professor European Smart Cities University of the West of England, Bristol Integrated smart city model Smart Mobility Services focused on decreasing
ECBC SBIR/STTR Projects. ECBC SBIR/STTR MSCoE STRF Conference
 ECBC SBIR/STTR Projects ECBC SBIR/STTR MSCoE STRF Conference JAMES M. CRESS, JANET L. JENSEN, JAMES O. JENSEN OCTOBER 2012 Report Documentation Page Form Approved OMB No. 0704-0188 Public reporting burden
ECBC SBIR/STTR Projects ECBC SBIR/STTR MSCoE STRF Conference JAMES M. CRESS, JANET L. JENSEN, JAMES O. JENSEN OCTOBER 2012 Report Documentation Page Form Approved OMB No. 0704-0188 Public reporting burden
FIRE DETECTION USING COMPUTER VISION MODELS IN SURVEILLANCE VIDEOS
 FIRE DETECTION USING COMPUTER VISION MODELS IN SURVEILLANCE VIDEOS M. V. D. Prasad, G. Jaya Sree, K. Gnanendra, P. V. V. Kishore and D. Anil Kumar Department of Electronics and Communications Engineering,
FIRE DETECTION USING COMPUTER VISION MODELS IN SURVEILLANCE VIDEOS M. V. D. Prasad, G. Jaya Sree, K. Gnanendra, P. V. V. Kishore and D. Anil Kumar Department of Electronics and Communications Engineering,
SUCCESS STORY EUROPA-PARK A WinGuard Reference Project
 SUCCESS STORY EUROPA-PARK A WinGuard Reference Project Michael Mack Management Europa-Park Resorts Being the operator of Germany s largest leisure park, not only the safety of the rides is important. The
SUCCESS STORY EUROPA-PARK A WinGuard Reference Project Michael Mack Management Europa-Park Resorts Being the operator of Germany s largest leisure park, not only the safety of the rides is important. The
Chapter 1 Introduction
 Chapter 1 Introduction This chapter presents an introductory background to the research work undertaken, the problem statement, research issues involved and objectives of the research work. The contribution
Chapter 1 Introduction This chapter presents an introductory background to the research work undertaken, the problem statement, research issues involved and objectives of the research work. The contribution
CFD Analysis of temperature dissipation from a hollow metallic pipe through circular fins using Ansys 14.5
 IJAET International Journal of Application of Engineering and Technology ISSN: 2395-3594 Vol-1 No.-2 CFD Analysis of temperature dissipation from a hollow metallic pipe through circular fins using Ansys
IJAET International Journal of Application of Engineering and Technology ISSN: 2395-3594 Vol-1 No.-2 CFD Analysis of temperature dissipation from a hollow metallic pipe through circular fins using Ansys
Computer Models For Evacuation
 Computer Models For Evacuation Model Name: buildingexodus Version: 4.06 (release V4.1 due first half of 2008) Date: 1 August 2007 Classification: Human behaviour/evacuation model Very Short Description:
Computer Models For Evacuation Model Name: buildingexodus Version: 4.06 (release V4.1 due first half of 2008) Date: 1 August 2007 Classification: Human behaviour/evacuation model Very Short Description:
Development of cleaning system installed in horizontal moving system for maintenance of high-rise building
 Development of cleaning system installed in horizontal moving system for maintenance of high-rise building Jaemyung Huh 1, Sung-Min Moon 1, Sung-Won Kim 1, Daehie Hong 2 * 1 Department of Mechanical Engineering,
Development of cleaning system installed in horizontal moving system for maintenance of high-rise building Jaemyung Huh 1, Sung-Min Moon 1, Sung-Won Kim 1, Daehie Hong 2 * 1 Department of Mechanical Engineering,
ECE Department, SVCET, Chittoor, Andhra Pradesh, India. Department of ECE, S. V. College of Engineering, Tirupati, Andhra Pradesh, India
 2018 IJSRSET Volume 4 Issue 4 Print ISSN: 2395-1990 Online ISSN : 2394-4099 Themed Section : Engineering and Technology Implementation of Smart Home Automation with Enhanced Security M. Ummay Hagera *1,
2018 IJSRSET Volume 4 Issue 4 Print ISSN: 2395-1990 Online ISSN : 2394-4099 Themed Section : Engineering and Technology Implementation of Smart Home Automation with Enhanced Security M. Ummay Hagera *1,
Intelligent Buildings
 Intelligent Buildings How Technology is Changing What is Possible in the Built Environment Jim Vallort, FASHRAE ESD, Environmental Systems Design Chicago, San Francisco Denver & Dallas Jvallort@ESDglobal.com
Intelligent Buildings How Technology is Changing What is Possible in the Built Environment Jim Vallort, FASHRAE ESD, Environmental Systems Design Chicago, San Francisco Denver & Dallas Jvallort@ESDglobal.com
Experimental Study on the Performance and Oil Return Characteristics of Multi-Split Air- Conditioning System for Medium Size Building
 Purdue University Purdue e-pubs International Refrigeration and Air Conditioning Conference School of Mechanical Engineering 2004 Experimental Study on the Performance and Oil Return Characteristics of
Purdue University Purdue e-pubs International Refrigeration and Air Conditioning Conference School of Mechanical Engineering 2004 Experimental Study on the Performance and Oil Return Characteristics of
Cedar Grove Public Schools Voter Referendum. October 2, PM 8 PM
 Cedar Grove Public Schools Voter Referendum October 2, 2018 2 PM 8 PM We Did Our Homework Consulted extensively with the Cedar Grove Police Department Consulted with multiple law enforcement agents from
Cedar Grove Public Schools Voter Referendum October 2, 2018 2 PM 8 PM We Did Our Homework Consulted extensively with the Cedar Grove Police Department Consulted with multiple law enforcement agents from
Innovative EEE mini-projects list
 1 Innovative EEE mini-projects list SEM-133. Checking and auto control of water level using wireless sensor. SEM-140. Wireless 3-phase motor starter using RF technology. SEM-185. Designing of Haptic Keypad
1 Innovative EEE mini-projects list SEM-133. Checking and auto control of water level using wireless sensor. SEM-140. Wireless 3-phase motor starter using RF technology. SEM-185. Designing of Haptic Keypad