Roboto bazė mokymams Bakalauro darbas
|
|
|
- Jared Maximilian Chase
- 5 years ago
- Views:
Transcription
1 ŠIAULIŲ UNIVERSITETAS TECHNOLOGIJOS FAKULTETAS ELEKTRONIKOS KATEDRA Alexander Abramovich Roboto bazė mokymams Bakalauro darbas Vadovas doc.dr. N. Ramanauskas ŠIAULIAI, 2012
2 2 ŠIAULIŲ UNIVERSITETAS TECHNOLOGIJOS FAKULTETAS ELEKTRONIKOS KATEDRA TVIRTINU Katedros vedėjas doc. dr. G. Daunys Roboto bazė mokymams Elektronikos inžinerijos bakalauro darbas Vadovas doc. dr. N. Ramanauskas Recenzentas Atliko VR-7 gr. stud. A. Abramovich lekt. dr. Dainius Balbonas ŠIAULIAI, 2012
3 3 Abramovich A. Base of Robot for Teaching. Bachelor Thesis of Electronics. Engineering and research advisor: Ramanauskas N. Šiauliai University, Faculty of Technology, Department of Electronics. Siauliai, pp. Summary The modern robots are the complicated engineering systems consisting of a great number of various components. The analysis of such systems is very complicated and difficult for students who study the basics of automation and robot technologies. Therefore, for these students it is necessary to have not complicated and easily comprehended practical bases for laboratory studies. The base of robot intended for teaching was projected and produced in the present Bachelor Thesis. The aim of Bachelor Thesis to project and produce the base of robot for teaching. The object of Bachelor Thesis the projection and production of the base of robot for teaching. The Thesis consists of two parts: theoretical and practical. The analysis of similar commercial equipment (robots) was conducted in the first part of the Thesis. The review of the technologies applied in the projecting and production of the robot was also presented in theoretical part. The practical part of the Thesis includes the description of the robot production and manufacture. In this part four demonstration programmes representing the principles of robot operation were written. The mechanical part of the robot base consists of aluminum frame and electrical motors, to which the wheels of the robot are connected through the reduction gear. The maximal current of the motors is 500 ma. The ratio of reduction is 1:48. The microcontroller PIC16F887 is chosen for the control of sensors and peripheral equipment. The programmer PICKIT 2 is used for the programming of microcontroller. The I 2 C and UART appearances allowing the connection of additional peripheral equipment are also provided. The schemes of sensors, power supply and control of motors are projected on separate plates. The line following sensor, infrared sensor and ultra sound sensor are used in the Thesis. All the sensors were successfully tested and the programmes were written basing on the results of the tests. The present robot will allow the students learning the main principles of robot technologies, control of electrical motors and operation of sensors. The produced robot shall not be considered to be complete and, thus, it presupposes the possibilities of upgrading and connection of additional peripheral equipment.
4 4 Turinys Įvadas RINKOJE ESANČIŲ PANAŠIŲ ĮRENGINIŲ ANALIZĖ LEGO Mindstorm VEX Robotics Design System Fischertechnik Robot Construction Kits Rinkos apžvalgos išvados NAUDOJAMŲ TECHNOLOGIJŲ APŽVALGA USB H-tiltas (H-bridge) Infraraudonų spindulių technologijos (jutikliai) Ultragarso technologijos (jutikliai) ĮRENGINIO STRUKTŪRINĖ SCHEMA ĮRENGINIO ELEKTRINĖ PRINCIPINĖ SCHEMA Mikrovaldiklio grandinė Maitinimo šaltinis Įtampos reguliatorių grandinės Jutiklių grandinės Elektros variklių valdymo grandinės SPAUSDINTO MONTAŽO PLOKŠTĖ PROGRAMINĖ ĮRANGA Linijos sekimo programinė įranga Analoginio SHARP GP2 programinė įranga Skaitmeninių ultragarsinių jutiklių programinė įranga Bandymų rezultatai IŠVADOS LITERATŪRA... 44
5 5 Priedai 1 Priedas. 1A ir 3A įtampos reguliatoriai, elektrinės principinės schemos Priedas. 1A ir 3A įtampos reguliatoriai, detalių išdėstymas Priedas. 1A ir 3A įtampos reguliatoriai, spausdinto montažo plokštės Priedas. Variklių valdymo grandinė, elektrinė principinė schema Priedas. Variklių valdymo grandinė, detalių išdėstymas Priedas. Variklių valdymo grandinė, spausdinto montažo plokštė Priedas. Infraraudonųjų spindulių jutiklis, elektrinė principinė schema Priedas. Infraraudonųjų spindulių jutiklis, detalių išdėstymas Priedas. Infraraudonųjų spindulių jutiklis, spausdinto montažo plokštė Priedas. Linijos siekimo jutiklis, elektrinė principinė schema Priedas. Linijos siekimo jutiklis, detalių išdėstymas Priedas. Linijos siekimo jutiklis, spausdinto montažo plokštė Priedas. Mikrovaldiklio plokštė, elektrinė principinė schema Priedas. Mikrovaldiklio plokštė, detalių išdėstymas Priedas. Mikrovaldiklio plokštė, elektrinė principinė schema Priedas. Detalių sąrašas...63
6 6 Paveikslai 1.1 pav. Lego Mindstrom valdiklis pav. Lego Mindstorm projekto pavyzdys pav. Vex Robotics design system projekto pavyzdys pav. Vex robotics design system valdiklis pav. Fischertechnik Robot Construction Kit valdiklis pav. USB kabelio struktūra pav. H-tilto struktūrinė schema pav. H-tilto veikimo principas pav. Infraraudonųjų spindulių jutiklio veikimo principas pav. SHARP GP2D120XJ00F jutiklis pav. Jutiklio struktūrinė schema pav. Jutiklio veikimo principas pav. Išėjimo įtampos ir atstumo iki objekto santykis pav. Ultragarsinio jutiklio veikimo principas pav. Ultragarsinis jutiklis HC-SR pav. Jutiklio laiko diagrama pav. Projektuojamo roboto struktūrinė schema pav. 5,7 V įtampos reguliatoriaus el. principinė schema pav. 5 V įtampos reguliatoriaus el. principinė schema pav. Linijos siekimo jutiklio el. principinė schema pav. Šviesos diodo parametrų skaičiavimo el. principinė schema pav. Infraraudonųjų spindulių jutiklio el. principinė schema pav. Mikroschemos L293D pajungimas pav. Įtampos reguliatorius pav. Linijos siekimo jutiklis pav. Infraraudonųjų spindulių jutiklis pav. Variklių valdymo plokštė pav. Mikrovaldiklio plokštė pav. Surinktas robotas be prijungtų jutiklių pav. Linijos siekimo jutiklio bandymo programos algoritmas pav. SHARP GP2 analoginio jutiklio bandymų algoritmas pav. Skaitmeninių ultragarsinių jutiklio programinė įranga...40
7 pav. analoginio SHARP GP2 jutiklio bandymai...42
8 8 Įvadas Kiekvienais metais robototechnikos rinkoje apyvarta siekia 5-6 milijardų dolerių, ir tas skaičius vis didėja. Robotai ir automatizuoti mechanizmai atsiranda beveik visuose mūsų gyvenimo srityse. Paskutiniais duomenimis, pasaulyje jau dabar veikia apie 1,8 milijonų visokių rūšių robotų: pramoninių, buitinių ar robotų žaislų. Robotas kas gi tai yra? Robotas tai elektromechaninis, pneumatinis, hidraulinis įrenginys, programa arba jų kombinacija, galinti atlikti užprogramuotas fizines užduotis. Robotas gali būti valdomas tiesiogiai žmogaus arba veikti užprogramuoto kompiuterio. Robotai gali atlikti užduotis, kurios yra pavojingos žmogui, dirbti žmonėms kenksmingoje aplinkoje. Jie taip pat gali atlikti monotoniškas, dažnai pasikartojančias užduotis, tokiu būdu pigiai pakeisdami žmogaus rankų darbą. Kalbant apie robotus reikia paminėti dar viena svarbų terminą robototechniką. Tai taikomasis mokslas, kuris skirtas automatizuotų sistemų projektavimui. Robototechnikoje sujungti įvairūs techniniai mokslai: elektronika, mechanika, pneumatika ir t.t. Šiuolaikiniai robotai yra sudėtingos inžinerinės sistemos, kurios susideda iš daug skirtingų komponentų. Universitetų studentams studijuojant automatizavimo ir robototechnikos pagrindus, yra sudėtinga analizuoti tokias sistemas. Todėl turi būti nesudėtinga ir lengvai suprantama praktinė bazė laboratoriniams darbams atlikti. Savo baigiamąjame darbe projektuoju laboratoriniams darbams skirtą nesudėtingą roboto platformą. Projektuojama platforma turi būti sudaryta iš atskirų modulių, kuriuos prireikus galima lengvai pakeisti. Studentai atliekant laboratorinius darbus, galės susipažinti su robototechnikos, automatikos pagrindais, taip pat patobulinti žinias apie jutiklius, mikrovaldiklių programavimą ir tam tikrus kitus elektronikos aspektus. Darbo tikslas: Suprojektuoti ir pagaminti roboto bazę mokymams. Darbo uždaviniai: 1. Atlikti panašių įrenginių ir technologijų analizę; 2. Suprojektuoti ir pagaminti roboto bazę mokymams; 3. Atlikti bandymus.
9 9 1. RINKOJE ESANČIŲ PANAŠIŲ ĮRENGINIŲ ANALIZĖ. Šiuo metu yra sukurta daug komercinės mokymo įrangos robotams analizuoti. Šiame skyriuje norėčiau trumpai aptarti komercinius įrenginius skirtus mokymams apie robotus. Taip pat palyginti jų techninius parametrus, kainą ir kitus aspektus LEGO Mindstorm Danų kompanija jau nuo senų laikų gamina konstruktorius skirtingo amžiaus žmonėms. LEGO kompanija ištisai atlieka žmonių apklausas, ir domisi jaunimo interesais. Vienas iš tokio darbo rezultatų tapo konstruktorius LEGO Mindstorm. Šio konstruktoriaus dėka galima sukurti robotą, kuris turi skaitmenines "smegenis" procesorių NXT. Pirmas konstruktorius iš serijos Mindstrom atsirado rinkoje 1998 metais. Po 8 metų atsirado versija Mindstrom NXT, o 2009 metais Mindstorm NXT 2.0. Išskirtinis LEGO robotų bruožas yra tas, kad visos detalės ir elementai yra jungiami kaip klasikinio LEGO konstruktoriaus. Mindstorm konstruktorius dažniausiai susideda iš standartinių detalių rinkinio (ratai, krumpliaračiai ir t.t.) ir rinkinio, susidedančio iš jutiklių, elektros variklių ir programuojamo bloko. Papildomai galima papildyti rinkinius atskirai įsigytais moduliais. Kompanija LEGO sukūrė kelis skirtingus jutiklius Mindstorm konstruktoriui: 1. Garso jutiklis NXT; 2. Atstumo jutiklis NXT (panaudojama ultragarso technologija); 3. Apšviestumo jutiklis NXT; 4. Prisilietimo jutiklis NXT; 5. Variklis-tachometras NXT. Valdymo blokui programuoti LEGO sukūrė programinę įrangą NXT-G ir Robolab. Kai rinkoje pasirodė šis konstruktorius, atsirado ir kitų įmonių sukurta programinė įranga. Šiuo metu galima rasti ir tekstinės, ir grafinės LEGO Mindstorm programavimo kalbas. Viena iš pažangiausių kalbų yra Microsoft Robotics Developer Studio.


10 pav. Lego Mindstrom valdiklis 1.2. pav. Lego Mindstorm projekto pavyzdys 1.2. VEX Robotics Design System VEX Robotics Design System tai dar vienas iš esančių rinkoje konstruktorių skirtų robotų modeliavimui ir konstravimui. Nors dažniausiai panašūs įrenginiai vadinami konstruktoriais, šį produktą pagal savo savybes galime vadinti robotų projektavimo sistema. Šis rinkinys leidžia sujungti tarpusavyje skirtingus jutiklius, variklius ir kitas dalis, kurios dera tarpusavyje. VEX Robotics Design System, kaip skelbia gamintojai savo tinklapyje, buvo projektuojama kaip sistema skirta moksleiviams, studentams ar visiems kitiems, kurie domisi robotais[1].
11 11 Mokymosi palengvinimui VEX Robotics kompanija visas roboto dalis išskyrė į posistemes. Kiekvienas posistemis atsakingas už tam tikrą dalį veikiančiame robote. Tokiu būdu mes galime išdalinti sudėtingą sistemą, taip palengvindami šios sistemos analizę[2]. Struktūrinis posistemis (The Structural subsystem). Iš pavadinimo galime suprasti, kad šis posistemis tai roboto kūno mechaninė dalis. Šios dalys dažniausiai pagamintos iš plieno ar aliuminio. Visos dalys tarpusavyje yra suderinamos, kai kurias dalis galima net lankstyti, pritaikant jas projektams. Taip pat į šį posistemį įeina ir varžtų komplektai, kurie naudojami detalių sujungimui. Judėjimo posistemis (The Motion subsystem). Šis posistemis apjungia visas dalis, kurios suteikia projektuojamam robotui judėjimą: guoliai, velenai, ratai, padangos ir varikliai. Taip pat yra sukurta daug įvairių reduktorių, kurių pagalba galima didinti ar mažinti variklių greitį. Yra numatytas ir skirtingų elektros variklių panaudojimas: servo, žingsniniai arba paprasti nuolatinės srovės varikliai. Jėgos/maitinimo posistemis (The power subsystem) tai roboto maitinimas. Tam yra suprojektuoti universalūs AA ir AAA baterijų laikikliai kuriuos sėkmingai galima panaudoti VEX sistemose. Esama ir gamintojo sukurtų VEX Robotics baterijų. Jutiklių posistemis (The Sensor subsystem). Šis posistemis apima roboto akis jutiklius. VEX Robotics kompanija turi platų jutiklių asortimentą: prisilietimo jutiklis, kliūties jutiklis (bumper sensor), šviesos jutiklis, akselerometras, infraraudonų spindulių linijos sekimo jutiklis, ultragarso atstumo jutiklis ir kiti jutikliai. Visi jutikliai turi universalias jungtis, kurias galima panaudoti prijungiant prie valdymo bloko. Valdymo posistemis (The Control subsystem). Dauguma komercinių robotų konstruktorių skirti autonominiams robotams projektuoti, bet VEX Robotics kompanija daugiausiai dėmesio skiria nuotolinio valdymo robotams. Valdymo posistemis apima siųstuvą, imtuvą ir signalų skirstytuvą. Signalo imtuvas gali būti prijungtas prie mikrovaldiklio. Loginis posistemis (The Logic subsystem) - tai roboto mikrovaldiklis. Visos elektrinės detalės jungiamos prie mikrovaldiklio. Yra sukurtos trys VEX mikrovaldiklių sistemos, kurios naudoja PIC18, ARM9 ir ARM Cortex mikrovaldiklius. Programavimas. Programavimui yra sukurtos EasyC (EasyC PRO), RobotC ir MPLAB oficialios programavimo kalbos. Beveik visos kalbos kai pagrindą naudoja C/C++ programavimo kalbą. Kai kurios programos turi grafinio programavimo galimybes[3].




12 pav. Vex Robotics design system projekto pavyzdys 1.4. pav.vex robotics design system valdiklis Fischertechnik Robot Construction Kits Fischertechnik - lavinantis konstruktorius vaikams, paaugliams, studentams, sukurtas vokiečių profesoriaus Artur Fischer 1964 metais. Konstruktoriai visame pasaulyje naudojami robotizuotų mechanizmų ir mašinų veikimo principams demonstravimui. Šie konstruktoriai naudojami mokyklose, specialiose ir aukštosiose mokymo įstaigose. Visą produkciją gamina Fischertechnik GmbH įmonė, esanti Vokietijoje. Ši įmonė yra holdingo GmbH & Co dalis. Kitos įmonės priklausančios šiam holdingui irgi gamina tam tikras dalis Fischertechnik robotų konstruktoriams[4]. Yra išleistos kelios serijos šių konstruktorių. Kiekviena serija yra priskirta tam tikram žmogaus amžiui: - Junior skirta vaikams nuo 5 metų; - Basic and Advanced konstruktoriai skirti vaikams nuo 7 metų;

13 13 - Profi skirta vaikams nuo 9 metų, ši serija supažindina vaikus su elektronikos, mechanikos, pneumatikos ir statikos pagrindais; - Computing robotai skirti vaikams nuo 10 metų. Šioje serijoje jau naudojami programuojamieji mikrovaldikliai; - Industry komplektai skirti susipažinimui su įvairiais automatizuotais procesais pramonėje; - Plus - papildomi konstruktoriai. Pagrindinis elementas šio konstruktoriaus yra blokas su grioveliais. Tokia forma leidžia jungti šiuos elementus skirtingomis kombinacijomis. Taip pat į komplektus įeina programuojamieji mikrovaldikliai, elektriniai varikliai ir jų valdymo sistemos, jutikliai, maitinimo šaltiniai ir kitos detalės leidžiančios robotams judėti ir atlikti paskirtas funkcijas[5]. Pirmuose konstruktoriuose elektroninės valdymo grandinės buvo gana sudėtingos ir buvo naudojamos pramoninės elektronikos inžinieriams mokyti, imituojant robotus. Buvo naudojami tokie elementais kaip Šmito trigeris, operacinis stiprintuvas, vėlinimo grandinės, įvairūs jutikliai ir kiti elementai. Nuo 1989 metų pabaigos konstruktoriuose atsirado mikrovaldikliai. Šiuolaikiniuose valdymo blokuose naudojami ARM9 mikrovaldikliai. Jų programavimui galima naudoti RoboPro, Visual C++ ir kitas programas. Į mikrovaldiklį yra įrašyta programa BootLoader kuri leidžia programuoti mikrovaldiklius tiesiogiai juos prijungus prie kompiuterio. Visos programos įrašomos panaudojant USB arba Bluetooth sąsajos pav. Fischertechnik Robot Construction Kit valdiklis
14 Rinkos apžvalgos išvados Šiame savo darbe paminėjau kelis populiariausius konstruktorius ir komplektus skirtus mokiniams, studentams ir kitiems suinteresuotiems asmenims susipažinti su robotų veikimo principais. Kiekvienas iš komplektų turi savo privalumus ir trūkumus. Rinkos apžvalgos išvadose pateikiu palyginimo lentelę (1 lentelė). Šioje lentelėje atsispindi techninės, pneumatines, elektroninės, programavimo komplektų galimybės. 1 lentelė. Komercinių konstruktorių palyginimo lentelė. Lego Mindstorm Fischertechnik robots VEX Robotics Konstruktoriai Lego Mindstorm NXT 2.0. Robo TX Training Lab; Robo Mobile Set; Industry Robots II; robot arm; Pneumatic Robots ir kiti. VEX Classroom Lab Kit with Cortex; Robot Starter Bundles; VEX Pro. Techninė įranga Klasikiniai Lego statybos Fischertechnik statybos Metalinės detalės iš metalo blokai, 32-bitų blokai 32 bitų ar aliuminio, 32 bitų mikrovaldiklis ir jutikliai. mikrovaldiklis ir jutikliai. Seni konstruktoriai turėjo mikrovaldiklis. 16 ir 8 bitų mikrovaldiklius. Mikrovaldikliai ARM 7 48 MHz B&W LCD display speaker with voice synthesis 4 sensor ports 3 encoder motor ports USB Bluetooth I²C ARM MHz B&W LCD display no speaker 8 sensor ports 4 encoder motor ports / 8 analog outputs USB Bluetooth I²C ARM MHz B&W LCD display no speaker 8 sensor ports 4 encoder motor ports / 8 analog outputs USB Bluetooth I²C Programinės įranga no expansion ports NXT-G, RobotC ir kitos programos. 2 expansion ports RoboPro, Visual C++ ir kitos programos. 2 expansion ports EasyC (EasyC PRO), RobotC, MPLAB ir kitos NXT-G galimas grafinis RoboPro galimas grafinis programos. Galimas ir programavimas. programavimas. grafinis programavimas.
15 15 Įsigijimo galimybės Lengvai prieinamas produktas. Standartiniai rinkiniai turi visus elementus reikalingus pradžiai. Į komplektą neįeina baterijos ir akumuliatoriai. Prieš perkant reikia perskaityti aprašymą. Skirtingi komplektai turi skirtingas detalės. Kai kurie komplektai turi programinę įrangą, kai kurie ne. Lengvai prieinamas produktas. Standartiniai rinkiniai turi visus elementus reikalingus pradžiai. Į komplektą neįeina baterijos ir akumuliatoriai. Bendri ypatumai - Visi rinkiniai naudoja metrinę skaičiavimo sistemą; - Komplektų kainos gana aukštos; - Visose rinkiniuose yra skaitmeniniai variklių valdymo įrenginiai; - Palaikomos USB ir "Bluetooth", I ² C sąsajos; - Yra galimybė prijungti pneumatinius įrenginius ir jos valdyti. Suderinamumas Komplektai nėra lengvai suderinami tarpusavyje. Hibridiniai projektai yra galimi, bet techniškai sudėtingesni. Privalumai - Konstruktorius daugiau - Konstruktorius daugiau - Konstruktoriaus pritaikytas judantiems pritaikytas stacionariems mechaninės galimybės (mobiliems) projektams; projektams kurti; leidžia kurti sudėtingus - Labai paprastas - Konstruktoriaus projektus; konstruktorius, veikimo mechaninės galimybės - Mikrovaldiklio jungtys principo supratimui užtenka leidžia kurti sudėtingus yra standartinės. Tai leidžia komplekto instrukcijos; projektus; prijungti net į komplektus - Yra galimybe prijungti - Mikrovaldiklio jungtys neįeinančias dalis (pvz. reduktorius, diferencialus yra standartinės. Tai Arduino/ Netduino dalys); ar papildomas pavaras; leidžia prijungti net į - Mikrovaldiklį galima - Mechaninės detalės labai komplektus neįeinančias maitinti iš stacionaraus lengvai jungiasi dalis (pvz. Arduino/ maitinimo šaltinio. tarpusavyje. Netduino dalys); - Mikrovaldiklį galima maitinti iš stacionaraus maitinimo šaltinio; - Mechaninės detalės labai lengvai jungiasi tarpusavyje. Trūkumai - Maitinimas numatytas tik - Konstruktoriaus detalės - Detalių sujungimui iš baterijų, ar baterijų turi būti labai tikslios. naudojami varžtai ir kitos formos akumuliatorių; Kartais komplektuose papildomos detalės. Tai - Kabelių jungtys yra galime rasti brokuotas apsunkina projektavimą; užpatentuotos. Kuriant detales, kurios nesijungia - Aukšta kaina. projektą reikalingi skirtingų su kitomis; ilgių kabeliai, kurie yra - Kai kuriuose
16 16 gana brangus; - Kompletai skirti darbui su pneumatika, yra labai sunkiai suderinami su kitais konstruktoriais. komplektuose vietoj žingsninių variklių, yra naudojami paprasti nuolatinės srovės varikliai (pvz. Mechaninių rankų konstruktoriai). Tai apsunkina projektavimą.
 prijungti.")
17 17 2. NAUDOJAMŲ TECHNOLOGIJŲ APŽVALGA 2.1. USB USB (Universal Serial Bus universali nuoseklioji magistralė) - nuosekli magistralė, pasižyminti vidutine perdavimo sparta. Ji skirta įvairiems periferiniams įtaisams (klaviatūrai, spausdintuvams, skeneriams, garso sistemoms ir t.t.) prijungti. Šiuo metu USB populiariausias sąsajos tipas, kuris pakeičia RS232 PC ryšį su klaviatūromis, skaitmeniniais telefonais, manipuliatoriais, videokameromis, audio sistemomis ir kitais išoriniais įrenginiais. USB topologija yra žvaigždinė Prie jos galima prijungti 127 loginius įrenginius. Mainų greitis siekia USB Mbps (full speed), arba 1.5 Mbps (low speed) ir 480 Mbit/s USB2.0 versijai. Periferinių įtaisų pajungimui naudojamas keturių gyslų laidas, iš kurių du kabeliai (vyta pora) naudojami duomenų perdavimui ir siuntimui, o likusieji du kabeliai įrenginio maitinimui perduoti[6] pav. USB kabelio struktūra Ryšio atstumas - iki 5 m segmentui (atšakai). Rekomenduojama naudoti 28 AWG susuktos poros (galima ir nesusuktos, tik tada ryšio atstumas sutrumpėja iki 3 m segmentui) kabelį. USB struktūroje pagrindinė dalis yra kontroleris, kuris dažniausiai yra sudedamoji PC dalis. Kiti įrenginiai jungiami per šakotuvus (angl.hub). Plačiausiai paplitę keturių kanalų HUB-ai. Šakotuvas stebėdamas D+ ir D- linijas suranda naujai prijungiamus įrenginius, be to D+ ir D- linijomis yra perduodami duomenys. Duomenys perduodami panaudojant NRZI (Non Return to Zero, Inverted - potencialinį kodą su inversija esant vienetui) kodavimo principą, tačiau inversija yra atliekama esant nuliui, o perduodant 1 potencialas yra nekeičiamas. Norint išvengti ilgų vienetų serijų, po 6 vienetų yra įterpiamas nulis, tačiau dėlto nukenčia linijos greitis[6]. Maitinimo linijų, įmontuotų į USB sąsaja, galima prijungti periferinius įtaisus kurie neturi savo maitinimo šaltinių. Didžiausia srovė, kuria galima perduoti per magistralę turi būti ne didesne nei 500mA. Naujose versijose USB 3.0 srovės riba padidėjo iki 900mA. Nuo 1994 metų buvo sukurta daug magistralės versijų. USB sąsajos greitis priklauso nuo naudojamos USB versijos. USB 1.0 (išleista 1996 metais) turi du darbo režimus: full-speed 12 Mbit/s ir low-speed 1.5 Mbit/s. USB 2.0 (išleista 2000 metais) turi tris darbo režimus: low-speed
18 Kbit/s, full-speed 0,5 12 Mbit/s ir Hi-speed Mbit/s. Šie greičiai yra tik teoriniai, nes yra įskaičiuojama ir tarnybinė informacija, realus duomenų perdavimo greitis yra mažesnis. USB naudojami tokie komunikacijų lygmenys: - Kadras. Tai laiko intervalas tarp dviejų siunčiamų paketų pradžios. Jis yra 1 ms trukmės; - Paketas. Paketą sudaro trys elementai: valdymo informacija (informacijos šaltinis, imtuvas, duomenų ilgis), duomenys, taip pat klaidų detektavimo ir korekcijos informacija. - Protokolas. Tai sugrupuotas duomenų ryšulys. Jį sudaro požymio, duomenų ir patvirtinimo paketai H-tiltas (H-bridge). H-tiltas - tai elektroninė grandinė, kuri leidžia maitinti apkrovą, pakeičiant poliariškumą. Tokio tipo schemos dažnai naudojamos robotų elektronikoje arba prietaisuose, kur reikalingas nuolatinės srovės variklių reversas. H-tiltą galima įgyvendinti panaudojant integruotas grandines arba diskretinius elementus. H-tiltas pavaizduotas 2.2. paveiksle pav. H-tilto struktūrinė schema Grandinės forma primena lotynišką raidę H iš čia ir atsirado grandinės pavadinimas H-tiltas. H-tiltas yra sudarytas ir keturių jungiklių (2.2. pav.). Jungiant pirmą ir ketvirtą arba antrą ir trečią jungiklius, gauname įtampos reversą, tokiu būdu ir reversuojamas variklis (2.3. pav.). Projektuojant tokias grandines reikia atsiminti, kad pirmas ir antras ar trečias ir ketvirtas jungikliai negali būti įjungti vienu metu, nes jei jie bus įjungti, įvyks trumpas jungimas.
19 pav. H-tilto veikimo principas 2.3. Infraraudonų spindulių technologijos (jutikliai) Infraraudonieji spinduliai (IR) yra elektromagnetinės bangos kurių ilgis didesnis nei matomos šviesos, bet mažesnis nei radijo bangų. Infraraudonas spinduliavimas taip pat vadinamas šiluminiu spinduliavimu, nes infraraudoną spinduliavimą nuo šilto kūno žmogaus oda supranta kaip šilumą. Spinduliavimo bangos ilgis priklauso nuo temperatūros dydžio. Kuo didesnė temperatūra, tuo trumpesnis bangos ilgis. Sužadinti atomai ir jonai yra infraraudonųjų spindulių šaltiniai. IR spinduliai plačiai naudojami medicinoje (fizioterapija), maisto pramonėje (dezinfekcija, terminis apdirbimas ir t.t.), dažymo technologijose (dažų džiovinimas), automatikoje ir elektronikoje. Infraraudonieji spinduliai plačiai naudojami atstumo, kliūties, temperatūros, dūmingumo jutikliuose. Technologiškai prasčiausias kliūties ar atstumo jutiklis sudarytas iš šviesos diodo, kuris spinduliuoja tam tikro ilgo IR spindulius, ir foto-elemento (fotodiodas, fototranzistorius ir t.t.). Atspindėti spinduliai nuo kliūties pataiko ant fotoelemento paviršiaus ir pakeičia jo standartinę būseną (2.4. pav.). Bet tokie jutikliai turi daug trūkumų: - Atsispindėjimas priklauso nuo kūno paviršiaus formos ir spalvos (tamsios spalvos kūnas blogai atspindi IR spindulius); - Išorinių šaltinių IR spinduliai sukelia triukšmus imtuve; - Tiesioginis šviesos diodo maitinimas tai neracionalus energijos vartojimas.

20 pav. Infraraudonųjų spindulių jutiklio veikimo principas Triukšmui sumažinti dažniausiai naudojama impulso pločio moduliacija (PWM). Panaudojant mikrovaldiklį ar kitus įrenginius generuojami tam tikro dažnio impulsai, kurie paduodami į šviesos diodą. Imtuvas skirtas priimti tik riboto dažnio diapazono IR spindulius ir priima tik išsiųstą signalą nereaguojant į išorinius triukšmus. Infraraudonųjų spindulių jutiklis SHARP PG2D120. SHARP GP2D120XJ00F analoginis atstumą matuojantis jutiklis (2.5 pav.). Šis jutiklis yra priskiriamas prie GP2 serijos SHARP jutiklių. Šios serijos jutikliai pagaminti vieno dydžio korpusuose, bet skiriasi matavimo parametrais. Mano pasirinktas jutiklis SHARP GP2D120XJ00F matuoja atstumą nuo 4 iki 30 cm[7] pav. SHARP GP2D120XJ00F jutiklis. Iš struktūrinės schemos, pavaizduotos 2.6 pav., matome kad jutiklis sudarytas iš infraraudonųjų spindulių šviesos diodo (LED) ir priimančio atspindėtus spindulius imtuvo (PSD). PSD veikia pagal fotoefekto principą. Jis paverčia šviesos energija į elektros energiją. Užpatentuotos spinduliuojamo signalo fokusavimo ir imtuvo sistemos leidžia sumažinti iki minimumo pašalinius triukšmus. Taip pat ši sistema leidžia tiksliai išmatuoti atstumą iki objekto, nepriklausomai nuo objekto spalvos ar kitų parametrų[8].
21 pav. Jutiklio struktūrinė schema pav. Jutiklio veikimo principas. Jutiklio valdymas atliekamas, valdant maitinimo įtampą. Veikimo principas yra pavaizduotas 2.7 paveiksle. Didžiausia maitinimo įtampa yra 7 voltai [8]. Savo darbe valdymo grandinei suprojektuotas 5 V maitinimo šaltinis. Šios įtampos pilnai užteks jutiklio maitinimui. Išėjimo įtampa priklauso nuo objekto atstumo ir maitinimo. Šia priklausomybė yra pavaizduota 2.8 paveiksle.
22 Ultragarso technologijos (jutikliai) 2.8. pav. Išėjimo įtampos ir atstumo iki objekto santykis. Ultragarsas - tai elastinės bangos, kurių dažnis viršija žmogaus girdos viršutinę ribą (15-20 khz). Ultragarso dažnio viršutinę ribą lemia medžiagos sandara: dujų elastinių bangų ilgis didesnis už molekulių laisvojo kelio ilgį, o skysčių ir kietųjų kūnų už nuotolį tarp atomų. Ultragarso dažnių diapazonas skirstomas į tris sritis: < Hz žemo, Hz vidutinio ir Hz aukšto dažnio ultragarsą (elastinės bangos, kurių dažnis > Hz, vadinamos hipergarsu). Dujose ir skysčiuose gali sklisti tik išilginės, kietuosiuose kūnuose išilginės ir skersinės elastinės bangos. Jos sklinda kryptingai, nes dažniausiai palyginti su ultragarso šaltinio skersmeniu yra trumpos. Ultragarso sklidimo kryptis tiriama geometrinės akustikos metodais. Ultragarsas nuo didelių aplinkos nevienalytiškumų atsispindi ir lūžta. Ultragarsą galima fokusuoti akustiniais lęšiais ir reflektoriais. Jo sklidimo greitis priklauso nuo medžiagos tamprumo ir tankio; kai kuriose medžiagose jis priklauso ir nuo bangų
23 23 dažnio pasireiškia ultragarso greičio dispersija. Ultragarsas slopsta daugiau už žemesnio dažnio bangas[9]. Ultragarsą skleidžia gamtiniai triukšmo šaltiniai (lietus, griaustinis ir pan.), gyvūnai (šikšnosparniai, delfinai, kai kurių rūšių banginiai). Jį sužadina mechaniniai ultragarso generatoriai (švilpukai, sirena, hidrodinaminiai vibratoriai), kurie mechaninę skysčio ar dujų energiją paverčia ultragarso energija. Ultragarsas veikia žmogų, gyvūnus, augalus mikroorganizmus. Biologinis ultragarso poveikis priklauso nuo jo stiprumo ir trukmės. Pvz., 1-2 W/cm². stiprumo, Hz dažnio ultragarsas sukelia audinio mikromasažą: žmogaus ir gyvūno organizmo audiniuose geriau cirkuliuoja kraujas ir limfa. Organizmas sugeria ultragarsą, ir jo akustinė energija virsta šilumine. Audinių giluminis įšilimas pagerina medžiagų apykaitą. Tam tikro stiprumo ultragarsas sunaikina bakterijas ir virusus (pvz., tuberkuliozės mikrobakterijas ir šiltinės salmoneles, polimielito, encefalito virusus) W/cm². Ultragarso ilgalaikis poveikis ardo audinius ir ląsteles (dėl kavitacijos ir per didelio įšilimo). Ultragarso naudojimo sritys: medicina (fizioterapija, ultragarsinė diagnostika, chirurgija, medicininių aerozolių gamyba, medicininių instrumentų ir vaistinių medžiagų sterilizavimas), technika (detalių ultragarsinis valymas, ultragarsinis apdirbimas, ultragarsinis suvirinimas, aliuminio dirbinių litavimas, šilumos ir masės mainų bei elektrocheminių procesų spartinimas, dūmų ir aerozolių nusodinimas). Ultragarsu naudojamasi kietojo kūno fizikoje, hidrolokacijoje, defektoskopijoje, mikroskopijoje, kasyboje[9]. ULTRAGARSO ŠALTINIAI įrenginiai garsui sužadinti. Keičia kitos rūšies energiją, pvz., elektrinę, kinetinę, į akustinę energiją. Plačiausiai vartojami ultragarso šaltiniai yra pjezoelektrinis, magnetostrikcinis, elektrodinaminis, elektromagnetinis keitikliai. Jie verčia elektrinio lauko energiją kietojo kūno (plokštelės, strypo, diafragmos) virpesiais, kurie žadina ultragarsą (20 khz-1 GHz dažnio garso virpesius). Pjezoelektrinis keitiklis turi vieną ar kelis pjezoelementus, kurie sujungti su pasyviaisiais elementais (antgaliais, virpesių koncentratoriais, plokštelėmis, membranomis). Būna didelio intensyvumo (iki 10 W/cm²), vartojamas ultragarsinėje technologijoje, ir mažo intensyvumo (iki 1 W/cm²), vartojamas ultragarsinėje defektoskopijoje, lokacijoje, medicininėje diagnostikoje. ULTRAGARSINĖ LOKACIJA tai objekto susekimas ir jo koordinačių bei judėjimo parametrų matavimas ultragarso signalais. Būna pasyvioji (objektas pats spinduliuoja ultragarso signalus). Pasyviąja ultragarsine lokacija matuojamos objekto kampinės koordinatės, o atstumas iki jo apskaičiuojamas, išmatavus kampines koordinates iš dviejų arba daugiau skirtingų taškų. Aktyviąja ultragarsine lokacija kampinės koordinatės matuojamos pagal ultragarso signalų atėjimo

24 24 kryptį, o radialinis objekto greitis dažniausiai randamas pagal doplerinį dažnio pokytį. Atstumo matavimas: impulsiniais zonduojančiais ultragarso signalais matuojamas laiko intervalas tarp zonduojančio signalo išspinduliavimo ir atsispindėjusio signalo priėmimo momentų. Siunčiant nuolatinius signalus, atstumas randamas pagal atsispindėjusių signalų fazės arba dažnio pokyčių (2.9. pav.) pav. Ultragarsinio jutiklio veikimo principas Ultragarsinis jutiklis HC-SR04. Ultragarsinis atstumo jutiklis HC-SR04(2.10 pav.) leidžia išmatuoti atstumą nuo 2 iki 400 cm. Matavimo tikslumas siekia iki 3 mm. Jutiklis susideda iš trijų dalių: siųstuvo, imtuvo ir valdymo grandinės [10] pav. Ultragarsinis jutiklis HC-SR04. Jutiklio veikimo principas: Į įėjimą (trigger input) turi būti paduotas, ne trumpesnis kaip 10ms, aukšto lygio signalas; Siųstuvas iškarto išsiunčia 40kHz dažnio ultragarso bangą. Imtuvas laukia atspindėtos bangos;
25 25 Jei imtuvas užfiksuoja grįžtančią bangą, išėjimo aukšto lygio signalo trukmė lygi trukmei nuo signalo siuntimo pradžios iki atspindėto signalo gavimo imtuve (2.11 pav.) pav. Jutiklio laiko diagrama. Iš laiko diagramos pavaizduotos 2.11 paveiksle matome, kad jutiklio veikimo pradžiai reikia į įėjimą paduoti ne trumpesni nei 10us aukšto lygio impulsą. Po to siųstuvas išsiunčia 40kHz dažnio 8 impulsus, ir imtuvas laukia atspindėtos bangos. Kai gaunamas atspindėtas signalas, valdymo grandinė į išėjimą paduoda aukšto lygio signalą kurio trukmė lygi trukmei nuo signalo siuntimo pradžios iki atspindėto signalo gavimo imtuve. Žinodami šį laiką galima apskaičiuoti atstumą iki objekto[11]: Atstumas iki objekto(cm) = išėjimo signalo trukmė (us) / 58; (2.1) Siekiant išvengti signalų kolizijos, gamintojas siūlo atlikinėti daugiau kaip 60ms matavimo ciklą. 2 lentelė. Pagrindiniai jutiklio parametrai. Maitinimo įtampa Maitinimo srovė Ultragarso bangos dažnis Didžiausias matavimo atstumas Minimalus matavimo atstumas Įėjimo signalo trukmė DC 5 V 15mA 40kHz 400 cm 2 cm Ne mažiau kaip 10us
26 26 3. ĮRENGINIO STRUKTŪRINĖ SCHEMA Šiame skyriuje pateikiu mano projektuojamo roboto struktūrinę schemą, pavaizduotą 3.1. paveiksle, ir šios schemos aprašymą. Maitinimo šaltinis Kompiuteris El. variklių įtampos reguliatorius (DC-DC converter) Valdymo grandinių įtampos reguliatorius (DC-DC converter) Programavimo įtaisas (programatorius) El. variklių valdymo grandinė El. varikliai Mikrovaldiklis Mikrovaldiklio Palaikoma sąsaja (USB, RS 232 ir t.t.) Kiti išoriniai įrenginiai Įvedimo/ išvedimo moduliai Jutikliai 3.1. pav. Projektuojamo roboto struktūrinė schema. Roboto širdis mikrovaldiklis. Jis apdoroja visą informaciją apie aplinką, gautą iš jutiklių ir atlieka užprogramuotus veiksmus. Mikrovaldiklis turi palaikyti USB ar kokią nors kitą sąsają, tam kad būtų įmanoma užprogramuoti jį. Mikrovaldiklio programavimui bus naudojamas programatorius PICKIT 2. Įtampos reguliatorius bus naudojamas visos projektuojamos sistemos maitinimui. Energijos taupymo sumetimais, bus projektuojamas impulsinis nuolatinės įtampos reguliatorius. Priklausomai nuo suprojektuoto nuolatinės srovės reguliatoriaus ir visos suprojektuotos sistemos bus parinktas maitinimo šaltinis. Infraraudonų spindulių ir ultragarso technologijas panaudosiu jutiklių projektavime. Priklausomai nuo panauduotų variklių reikės suprojektuoti variklių valdymą. Taip pat turi būti numatytas greičio reguliavimas ir reverso galimybės. Kiekvieną projektuojamą dalį planuoju projektuoti atskirose plokštėse, tam kad reikalingu atveju galima būtų lengvai pakeisti ar atjungti tam tikrą dalį nekeičiant visos konstrukcijos.
27 27 4. ĮRENGINIO ELEKTRINĖ PRINCIPINĖ SCHEMA Vadovaujantis aukščiau pateikta struktūrine schema, suprojektuota elektrinė principinė schema. Schema susideda iš kelių grandinių: dviejų įtampos reguliatorių, mikrovaldiklio, variklių valdymo grandinių. Taip yra suprojektuoti linijos siekimo ir infraraudonųjų spindulių kliūties jutikliai Mikrovaldiklio grandinė Visų jutiklių valdymą atliks mikrovaldiklis. Todėl reikia tinkamai parinkti tinkamą mikrovaldiklį. Savo projektuojamajam robotui pasirinkau MicroChip PIC16F887 mikrovaldiklį. Šis mikrovaldiklis turi 40 išvadų. Parinktas mikrovaldiklis turi du PWM išvadus13 išvadų kuriuos galima naudoti kaip analoginius išvadus. Taip pat šis mikrovaldiklis palaiko I 2 C ir UART sąsajas. projektuota mikrovaldiklio grandinė pavaizduota 13 priede. Visi jutikliai ir kiti įrenginiai bus jungiami prie mikrovaldiklio specialiomis jungtimis. Taip pat prie mikrovaldiklio grandinės bus prijungtas LCD ekranas. RS ir E ekrano išvadai yra prijungti prie porto D 2 ir 3 skilties, duomenų išvadai yra prijungti porto D 4-7 skilčių. Jutiklių prijungimui panaudojau portą A, todėl kad jame galima panaudoti analoginį skaitmeninį keitiklį. Šios galimybės leidžia prijungti ne tik skaitmeninius, bet ir analoginius jutiklius bei kitus įrenginius. Mikrovaldiklio grandinėje suprojektavau tris mygtukus: perkrovimo, pertraukimo ir papildomas mygtukas. Perkrovimo mygtukas jungiamas prie pirmo išvado, ir bus naudojamas programos paleidimui iš naujo. Pertraukimo mygtukas yra prijungtas prie porto B nulinės skilties, ir bus naudojamas pertraukimo iškvietimui. Papildomas mygtukas prijungtas prie porto A ketvirtos skilties, ir priklausomai nuo programinės įrangos gali būti panaudotas robote. Elektros variklių valdymui panaudojau porto B pirma ir antra skiltį, bei porto D nulinį ir pirmą skiltį. Variklių greičiui reguliavimui PWM mikrovaldiklio išvadai (portas C pirma ir antra skiltis). Papildomai prie mikrovaldikio prijungiau pjezo elementą ir indikacinį diodą. Jie, priklausomai nuo programinės įrangos gali būti panaudoti įvairiam indikavimui.
28 Maitinimo šaltinis Projektuojamo roboto maitinimo šaltini parinkau 6 AA baterijų, po 1,5 volto, plokščią laikiklį. Bendra maitinimo įtampa bus 9 voltai. Taip pat galima panauduoti pakraunamus akumuliatorius po 1,2 volto. Priklausomai nuo suprojektuotų įtampos reguliatorių galima panaudoti ir kitus maitinimo šaltinius Įtampos reguliatorių grandinės Projektuojamame prietaise panaudojau keturis nuolatinės srovės variklius. Kiekvieno variklio maitinimas yra 3-6 voltai. Prie 3 voltų maitinimo variklio maitinimo srovė yra 260mA, o prie 6 voltų 470mA. Bendra srovė reikalinga variklių maitinimui bus lygi 1,88 A. Tam kad būtų galima išnaudoti visas nuolatinės srovės variklių galimybes, projektuoju dvi atskiras maitinimo grandines. Pirma grandinė bus skirta variklių maitinimui ir jos išėjime įtampos dydis apie 5,5 6 voltus. Antra grandinė maitins valdymo grandinę ir išėjimo įtampa bus lygi 5 voltams. Variklių maitinimui parinkau impulsinį įtampos reguliatorių LM2576. Šis įtampos reguliatorius gaminamas kelių rūšių: fiksuotos išėjimo įtampos (3,3V; 5V; 12V; 15V) ir derinamos išėjimo įtampos (LM2576-ADJ). Reguliatoriaus aprašyme yra pateikta standartinė principinė schema su reikalingais elementais (4.1. pav.). Todėl projektavimui reikia parinkti tik R1 ir R2 rezistorius. Jų parinkimui aprašyme taip pat yra pateiktos formulės[12]: R1 Vout = Vref ( 1+ ); (4.1) R2 Vout R1= R2 ( 1); (4.2.) V ref Čia V out - išėjimo įtampa(5,6 V); V ref - vardinė įtampa (1,23 V); R2 turi būti tarp 1kΩ ir 5kΩ (parenku 3,3kΩ). 5,6 R1= 3,3 ( 1)= 11, 72kΩΩ 1,23 Gavau R1= 11, 72kΩ. Tokio nominalo rezistoriaus negaminama, todėl parenku artimiausią standartinį nominalą. R1=12kΩ. Apskaičiuoju išėjimo įtampą, kai R1=12kΩ. 12 V out = 1,23 ( 1+ ) = 5,7V; 3,3
29 29 Parinkti elementai tenkina sąlygą pav. 5,7 V įtampos reguliatoriaus el. principinė schema Valdymo grandinės maitinimui parenku impulsinį įtampos reguliatorių LM2575. Šio reguliatoriaus didžiausia išėjimo srovė lygi 1 amperui. LM2572 reguliatorius gali būti fiksuotos išėjimo įtampos (3,3V; 5V; 12V; 15V) ir derinamos išėjimo įtampos. Valdymo grandinei reikalinga 5 V įtampa, todėl parenku fiksuotos išėjimo įtampos reguliatorių (LM2575-5)[13]. Reguliatoriaus aprašyme pateikta standartinė principinė schema su visais reikalingais elementais (4.2. pav.) pav. 5 V įtampos reguliatoriaus el. principinė schema 4.4. Jutiklių grandinės Infraraudonųjų spindulių linijos sekimo jutiklis. Šio projektuojamo jutiklio tikslas suteikti robotui galimybę judėti, ant nupaišyto judėjimo paviršiaus linijos trajektorijos. Projektavime panaudojau infraraudonų spindulių jutiklių technologiją. Suprojektuoto jutiklio schema yra pavaizduota 4.3 paveiksle.
30 pav. Linijos sekimo jutiklio el. principinė schema Jutiklis sudarytas iš trijų analoginių dalių, todėl vienos dalies aprašymas taip pat tiks likusioms dalims. Infraraudonų spindulių šaltinių parinkau 3mm šviesos diodą. Diodo maksimali srovė yra 20mA, maitinimo įtampa 1,2 V, bangos ilgis 940nm. Žinodamas šviesos diodo bangos ilgį, parenku infraraudonų spinduliu imtuvą foto tranzistorių. Foto tranzistoriaus duomenys: bangos ilgis 940nm, o didžiausia leistina srovė 0,8mA[14]. Infraraudonųjų spindulių šviesos diodų apkrovimui parenku rezistorius R1 = R5 = R9. R 1 = (V S - V L ) / I; (4.3) Čia: I srovė tekanti per šviesos diodą; Vs maitinimo įtampa(5 V); V L šviesos diodo įtampa(1,2 V).
31 pav. Šviesos diodo parametrų skaičiavimo el. principine schema. Žinodamas, kad maksimalus leistinas apkrovimas yra 20mA, skaičiavimui parenku 17mA apkrovimą. R1 = (5-1,2) / 0,017 = 223,53 Ω Apskaičiuoto nominalo rezistorių negamina, todėl parenku 220 Ω rezistoriųs. Apskaičiuoju koks apkrovimas bus prie 220 Ω rezistoriaus. I = (V S - V L ) / R1 = (5 1,2)/ 220 = 0,0172 A = 17,2 ma. Tam kad jutiklio išėjime būtų mažiau triukšmo, foto tranzistoriaus grandinėje prijungiu komporatorių LM339N. Parinktoje mikroschemoje yra 4 komporatoriai, bet mano jutikliui reikalingi tik trys, todėl vienas komparatorius lieka nepajungtas. Įėjimo LM339N komparatorių srovės yra nuo 25nA iki 50mA [15]. Foto tranzistoriaus grandines pajungiu prie neigiamų komparatoriaus įėjimų, ir jų apkrovimui parenku R2 = R6 = R10 = 10kΩ. Prie teigiamo įėjimo prijungiu paderinamą rezistorių R4 = R8 = R12 = 10 kω, jis padės tinkamai suderinti jutiklį, priklausomai nuo aplinkos sąlygų. Vizualiam jutiklio veikimo indikavimui prie komparatoriaus išėjimų prijungiu raudonus šviesos diodus(2,5 V, 20mA, 625nm). Maksimaliai juos nereikia apkrauti, todėl jų apkrovimo srovę parenku 5mA. R3 = R7 = R11 = (5 2,5) / 0,005 = 500 Ω. Apskaičiuoto nominalo rezistorių negamina, todėl parenku 470 Ω rezistorius. Infraraudonųjų spindulių jutiklis. Projektuojamas jutiklis yra sudarytas iš imtuvo ir siųstuvo. Siųstuvas išsiunčia 36 khz dažnio infraraudonųjų spindulių signalą, o imtuvas pritaikytas priimti šio dažnio spinduliavimą. Pagrindinis siųstuvo elementas yra impulso trukmės moduliacijos (ITM arba PWM) šaltinis NE555. Pajungimo schema su reikalingais elementais yra pateikta mikroschemos aprašyme [16]. Generuojamam dažniui ir impulso dydžiui reikia apskaičiuoti ir parinkti kondensatorių C2, rezistorius R3, R4 ir R5. Skaičiavimo formulė pateikta aprašyme [16]:
32 32 f = 1,49 2 ((R3 + R5)+ R4) ; C2 (4.4) 4.5. pav. Infraraudonųjų spindulių jutiklio el. principinė schema Parenku C2 = 0.001uF, R4 = 3,9 kω, R5 = 27kΩ ir paderinamą rezistorių R3 = 10 kω. Apskaičiuoju mažiausia(r3 =10 kω) ir didžiausia(r3 = 0 kω) dažnį: 1,49 1,49 6 f max = = = 0, = 42, 8kHz; , ( )+ 2 3,9 10 ) 1,49 1,49 6 f min = = = 0, = 33, 25kHz; , ( ) ,9 10 ) NE555 išėjimo maksimali srovė yra 200mA[16], todėl prie jo prijungiu du infraraudonųjų šviesos diodus(5mm, 100mA, 1,2V). Jų apkrovimui parenku rezistorius R1 = R2 = 56 Ω. Per šviesos diodus tekės apie 75 ma. Bendras mikroschemos apkrovimas bus 150 ma. Imtuvo pagrindinis elementas yra TSOP1736[17]. Paskutiniai skaičiai nusako kokio dažnio turi būti infraraudonųjų spindulių signalas, tam kad į jį sureaguotų jutiklis. Imtuvo išėjimo įtampa, jis neapšviestas reikalingu signalu yra lygus maitinimo įtampos dydžiui. Kai imtumas yra apšviestas, išėjimo įtampa lygi nuliui. Jutiklio derinimui, be prijungimo prie mikrovaldiklio, prie išėjimo, per tranzistorinį raktą, prijungiau šviesos diodą. Tranzistorinis raktas reikalingas, nes maksimali TSOP 1736 išėjimo srovė yra 5 ma.
33 Elektros variklių valdymo grandinės. Mano projektuojamajame robote bus panaudoti keturi nuolatinės srovės elektros varikliai. Variklių didžiausia naudojama srovė yra 470mA. Variklių valdymui parinkau mikroschemą L293D. L293D tai aukštos srovės dvigubas H-tiltas. Mikroschema sukurta tam, kad galima butų valdyti du elektros variklius, keičiant jų sukimosi greitį bei jų sukimosi kryptį. Didžiausia leistina vieno variklio srovė gali siekti 600mA[18]. Projektuojant spausdinto montažo plokštę turi būti numatytas mikroschemos aušinimas. Gamintojas pateikia du aušinimo variantus: žemės kojelės tūri būti prijungtos prie didelio ploto žemės takelio arba prie mikroschemos korpuso tūri būti prijungtas aušintuvas pav. Mikroschemos L293D pajungimas.
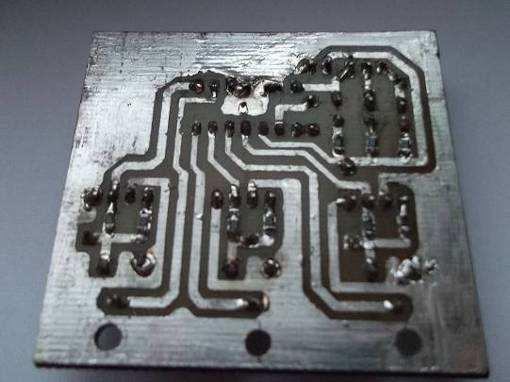
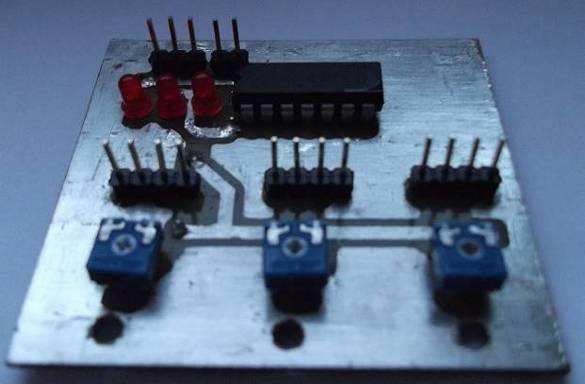
34 34 5. SPAUSDINTO MONTAŽO PLOKŠTĖ Pagal sudarytos elektrines principines schemas yra nubraižytos spausdinto montažo plokštės, jos pavaizduotos 3, 6, 9, 12 ir 15 prieduose. Spausdinto montažo plokščių projektavimas atliktas EAGLE programa. Mikrovaldiklio plokštėje panaudota dvipusė plokštė. Apatinėje dalyje sumontuoti paviršinio montavimo elementai: rezistoriai 0805 ir kondensatoriai 0805 korpusose. Šviesos diodai, mygtukai, elektrolitiniai kondensatoriai ir kiti elementai sumontuoti per kiaurymes. Mikrovaldikliui suprojektuotas lizdas, tam kad prireikus jį galima butų pakeisti. Apatinėje dalyje takelių storiai skirtingi : nuo 0,6 mm iki 1,4 mm. Viršutinėje dalyje takelių storis yra 1,4 mm. Visas laisvas plotas yra užpildytas žeme. Mikrovaldiklio suprojektuota ir pagaminta spausdinto montažo plokštė yra pavaizduota 5.5. paveiksle. Įtampos reguliatorių plokštės yra vienpusės. Paviršinio montažo elementai yra sumontuoti apatinėje pusėje: rezistoriai 0805 korpuse ir diodas SMC korpuse. Takelių storis yra 1,27 mm, panaudotas žemės užpildas. 3A įtampos reguliatorius pavaizduotas 5.1. paveiksle. Jutiklių grandinėse panaudotos dvipusės plokštės. Apatinėje dalyje sumontuoti paviršinio montažo rezistoriai ir kondensatoriai 0805 korpusuose. Visi kiti elementai montuojami per kiaurymes ir montuojami iš viršutinės plokštės dalies. Infraraudonųjų spindulių jutiklyje apatinėje dalyje takeliai yra 1mm storio, o viršutinėje dalyje 1,4 mm. Panaudotas žemės užpildas. Linijos siekimo jutiklyje tekeliai yra skirtingų storių: nuo 0,8 mm iki 1,6 mm. Taip pat panaudotas žemės užpildas. Linijos sekimo jutiklis pavaizduotas 5.2. paveiksle, o infraraudonųjų spindulių jutiklis pavaizduotas 5.3. paveiksle. Variklių valdymo plokštė susideda iš L293D mikroschemos ir kontaktų juostų. Visi elementai montuojami per kiaurymes. Mikroschemai yra suprojektuotas mišrus aušinimas. Aplink mikroschemą yra padarytas didelis žemės užpildas, prie kurio prijungti žemės išvadai. Taip pat ant mikroschemos korpuso yra priklijuotas radiatorius, kuris irgi aušina mikroschemą. Takelių storis yra 1,27 mm. Variklių valdymo plokštė yra pavaizduota 5.4. paveiksle. Remiantis spausdinto montažo plokštės brėžiniais pagamintas robotas, be prijungtų jutiklių, yra pavaizduotas 5.6 paveiksle.


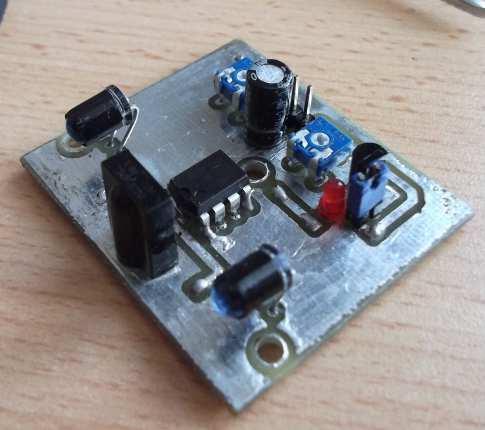
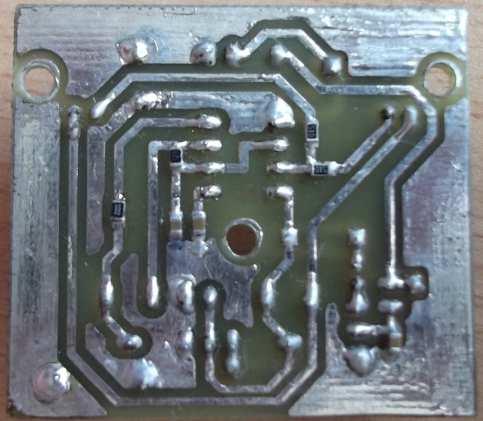


35 pav. Įtampos reguliatorius pav. Linijos siekimo jutiklis pav. Infraraudonųjų spindulių jutiklis pav. Variklių valdymo plokštė.



36 pav. Mikrovaldiklio plokštė pav. Surinktas robotas be prijungtų jutiklių.
37 37 6. PROGRAMINĖ ĮRANGA Suprojektuotos roboto bazės programinė įranga susideda iš kelių programų. Kiekviena programa yra skirta skirtingų jutiklių veikimo principų vaizdavimui. Visa programinė įranga mikrovaldikliui yra parašyta C kalba, panaudojant microc PRO 3.8 programą. Elektrinių variklių valdymo palengvinimui sukūriau biblioteka motor_library.h. Panaudojant ją sumažėja programos tekstas ir nereikia rašyti standartinių komandų reikalingų valdiklių valdymui Linijos sekimo programinė įranga Programos bendras principas roboto judėjimas pagal ant grindų nubraižytą juodą liniją. Programoje bus panaudotas LCD ekranas ir suprojektuotas linijos sekimo jutiklis. Programos palengvinimui linijos sekimo jutiklis buvo suprojektuotas kaip skaitmeninis jutiklis, bet esant išoriniams trikdžiams ar kitiems nenumatytiems atvejams galima panaudoti analoginį skaitmeninį keitiklį ir parašyti programą kurioje jutiklis bus analoginis. Suprojektuotas jutiklis susideda iš trijų elementų. Pirmas elementas yra montuojamas kairėje roboto pusėje, antras roboto priekio centre, trečias roboto dešinėje. Programos algoritmas nepriklauso nuo to ar jutiklis skaitmeninis, ar analoginis, jis yra pavaizduotas 6.1 paveiksle. Programos pradžioje atliekami pradiniai nustatymai: aprašomi kintamieji, aprašomas LCD ekranas, jei jutiklis yra analoginis aprašomas analoginis skaitmeninis keitiklis. Programos pradžioje išvedamas pradinis tekstas LCD ekrane, kuris nesikeičia visos programos bėgyje. Po pradinių nustatymų programoje įjungiamas amžinas ciklas. Ar jutiklio visi elementai balti jutiklio elementai nemato linijos. Robotas pradeda judėti, kol nepasikeis jutiklio būsena. Ar jutiklio visi elementai juodi jutiklio visi elementai užfiksavo juodą liniją. Robotas nustatytą laiką juda į priekį. Funkcija vykdoma kol nepasikeis jutiklio būsena. Ar pirmas jutiklio elementas juodas pirmas kairysis elementas užfiksavo juodą liniją. Robotas sustoja ir pradeda suktis į kairę. Robotas sukasi į kairę kol 2 elementas (centrinis) neužfiksuos linijos. Ar trečias jutiklio elementas juodas trečias dešinysis elementas užfiksavo liniją. Robotas sustoja ir pradeda suktis į dešinę. Robotas sukasi į dešinę kol 2 elementas (centrinis) neužfiksuoja linijos.
38 38 Programos pradžia Pradiniai nustatymai (kintamųjų aprašymas, jei jutiklis analoginis analoginių portų nustatymas) Judėjimas i priekį Taip Ar jutiklio visi tris elementai balti (nei viena jutiklio dalis nemato linijos)? Ne Nustatytą laiką roboto judėjimas i priekį Taip Ar jutiklio visi tris elementai juodi (visos jutiklio dalis mato linija)? Ne Judėjimas i priekį Taip Ar 2 jutiklio elementas juodas (centrinis jutiklio elementas)? Ne Robotas sukasi į karę Taip Ar 1 jutiklio elementas juodas (kairysis jutiklio elementas)? Ne Taip Ar 2 jutiklio elementas juodas (centrinis jutiklio elementas)? Ne Robotas sukasi į dešinę Ar 3 jutiklio elementas juodas (dešinysis jutiklio elementas)? Ne Ne Taip Ar 2 jutiklio elementas juodas (centrinis jutiklio elementas)? Ar programos pabaiga? Ne Taip Programos pabaiga 6.1. pav. Linijos sekimo jutiklio bandymo programos algoritmas.
39 Analoginio SHARP GP2 programinė įranga Ši programa skirta parodyti SHARP GP2 infraraudonųjų spindulių jutiklio veikimo principą, bei jo panaudojimo galimybės. Bandyme bus panaudotas vienas GP2 jutiklis. Algoritmas yra pavaizduotas 6.2. paveiksle. Atliekant pradinius nustatymus yra aprašomi kintamieji, LCD ekranas bei nustatomas analoginis skaitmeninis keitiklis, kuris reikalingas jutiklio informacijos apdorojimui. Gauti duomenys bus atvaizduojami LCD ekrane. Po pradinių nustatymų įjungiamas amžinas ciklas. Amžino ciklo pradžioje iškarto nuskaitomi duomenys iš jutiklio. Kol neaptikta kliūtis robotas juda į priekį. Kai aptinkama kliūtis robotas atvaizduoja apskaičiuotą atstumą ir juda į priekį mažesniu greičiu. Kai robotas pasiekia atstumą iki kliūties apie 10 cm, robotas pasisuka į kairę, ir amžinas ciklas prasideda iš naujo. Programos pradžia Pradiniai nustatymai Ne Ar nuspaustas mygtukas? Taip Nuskaitoma informacija iš jutiklio Gautų duomenų atvaizdavimas LCD ekrane Nuskaitoma informacija iš jutiklio Taip Ar jutiklis aptiko kliūtį? Gautų duomenų atvaizdavimas LCD ekrane Ne Robotas juda į priekį. Robotas juda į priekį. Ne Ne Ar atstumas mažesnis nei 10 cm? Taip Robotas pasisuka į kiarę Ar programos pabaiga? Taip Programos pabaiga 6.2. pav. SHARP GP2 analoginio jutiklio bandymų algoritmas
40 Skaitmeninių ultragarsinių jutiklių programinė įranga Ši programinė įranga skirta parodyti ultragarso jutiklių veikimo principą, bei pademonstruoti šių jutiklių panaudojimo galimybes. Šioje programoje bus panaudoti du ultragarso jutikliai. Pirmas jutiklis sumontuotas dešinėje roboto pusėje, kitas kairėje. Algoritmas pavaizduotas 6.3. paveiksle. Atliekant pradinius nustatymus aprašomi visi kintamieji, kurie bus panaudoti programoje, aprašomi visi įvedimo ir išvedimo įrenginiai (LCD ekranas, garsinis signalas). Programa pasileidžia nuo mygtuko paspaudimo, kuris yra prijungtas prie porto B nulinės skilties. Po mygtuko paspaudimo yra išmatuojamas atstumas su pirmu ultragarsiniu jutikliu, o paskui su antru. Jei visi išmatuoti atstumai yra didesni nei 30 cm, robotas važiuoja į priekį. Jei pirmo(dešiniojo) jutiklio išmatuotas atstumas iki kliūties yra mažesnis nei 30 cm, robotas sustoja ir sukasi į kairę. Analogiškai robotas veikia ir kai antrojo (kairiojo) jutiklio išmatuotas atstumas yra mažesnis nei 30 cm, tik šiuo atveju robotas sukasi į dešinę pav. Skaitmeninių ultragarsinių jutiklio programinė įranga
41 41 7. Bandymų rezultatai Šiame skyriuje yra aprašyti bandymai, kurie buvo atlikti su roboto bazės elementais. Pirmiausiai buvo tikrinamas energijos šaltinio veikimas, bei jo patikimumas, po jo patikrinta mikrovaldiklio grandinė. Jutiklių bandymui buvo parašyta atskira programinė įranga. Elektros variklių ir energijos šaltinio bandymas. Atliekant platformos badymus pastebėjau, kad per reduktorius ratus sukantys elektros varikliai, dirbdami pilnu galingumu iškarto nesireversuoja. Todėl keičiant sukimosi kryptį reikia pirmiausia juos sustabdyti, o po to jungti kitą sukimosi kryptį. Atliekant bandymus su skirtinga programine įranga pastebėjau, kad greitai išsikrauna baterijos. Roboto veikimo laiko prailginimui papildomai prie 6 AA baterijos laikiklio lygiagrečiai prijungiau tokį pat laikiklį. Tai leidžia prailginti veikimo laiką dvigubai. Mikrovaldiklio grandinės bandymas. Panaudojant skirtingą programinę įrangą atlikau mikrovaldiklio grandinės bandymus. Visi įėjimo/išėjimo portai veikė kaip ir buvo numatyta programinėje įrangoje. LCD ekranas turėjo būti jungiamas prie plokštės, panaudojant kontaktų juostą. Bet projektuodamas spausdinto montažo plokštę padariau klaidą ir išvadų numeracija pasikeitė. Tam kad ištaisyti klaidą suprojektavau laikiklį, ant kurio montuojasi LCD ekranas, bei kabelis kuris jungia ekraną su mikrovaldiklio plokšte teisinga eilės tvarka. Sėkmingai buvo išbandytas programavimui skirti išvadai ir kabelis kuris sujungia mikrovaldiklio plokštę su PICKIT 2 programatoriumi. Jutiklių bandymas. Suprojektuotas infraraudonųjų spindulių jutiklis. Pagrindinis suprojektuoto infraraudonųjų spindulių jutiklio elementas yra mikroschema NE555. Todėl beveik visi elementai buvo parenkami ir apskaičiuoti vadovaujantis NE555 aprašymu. Tačiau pagamintas jutiklis negeneruodavo 36 khz PWM signalo. Generuojamas dažnis buvo nuo 24 iki 34 khz (dažnio derinimui naudojama derinamas rezistorius). Todėl pagamintas jutiklis suveikdavo tik mažais atstumais: 1-3 cm. Taip pat generuojamo PWM signalo skverbtis buvo 20%. Signalo dažniui ir skverbties padidinimui, pakeičiau R4 ir R5 rezistorių nominalus. R4 rezistorius buvo pakeistas iš 3,9 kω į 12kΩ, o R5 iš 27kΩ į 10kΩ. Atlikti pakartotiniai bandymai parodė, kad PWM signalo skverbtis siekia 50%, o generuojamas dažnis gali būti derinamas nuo 33kHz iki 37,5 khz.


42 42 Analoginis SHARP GP2 ir ultragarsinis jutikliai. Jutiklių bandymui buvo parašyta programinė įranga. Pagrindinis šios programinės įrangos tikslas išmatuoti atstumus iki objektų panaudojant GP2 ir ultragarsinį jutiklius. Gauti rezultatai buvo lyginami su liniuote išmatuotais atstumais. Analoginio SHARP GP2 jutiklio bandymas pavaizduotas 7.1. paveiksle. Atstumo iki kliūties apskaičiavimui reikia išmatuoti jutiklio išėjimo įtampą. Todėl pagrindinis elementas šio jutiklio bandymų programos yra analoginis skaitmeninis keitiklis. Kaip pavaizduota 7.1., pirmoje LCD ekrano eilutėje yra atvaizduojamas analoginio skaitmeninio keitiklio gauti duomenys, o antroje eilutėje yra pavaizduojamas jau apskaičiuotas atstumas centimetrais. Pagrindinis elementas, skaitmeninio ultragarsinio jutiklio, bandymų programinės įrangos yra programiškai aprašytas laikmatis (Timer). Panaudojant laikmatį, yra išmatuojama išėjimo signalo trukmė mikrosekundžių tikslumu. Gautas rezultatas padalinamas iš 58 ir gaunamas atstumas cantimerais. Gauti rezultatai taip pat buvo lyginami su liniuote išmatuotais atstumais pav. analoginio SHARP GP2 jutiklio bandymai
43 43 IŠVADOS Šiame darbe buvo suprojektuota roboto bazė mokymams. Darbe atlikta panašių įrenginių analizė. Įgavau patirties projektuojant ir renkant jutiklius, bei išsiaiškinau jų veikimo principus. Rašant darbą išsiaiškinau naudojamas technologijas. Suprojektuotos ir pagamintos roboto bazės pagrindinis įrenginys mikrovaldiklis, kuris sumontuotas atskiroje plokštėje. Visi kiti įrenginiai yra jungiami prie mikrovaldiklio plokštės per specialias jungtis. Todėl itin svarbu buvo teisingai suprojektuoti spausdinto montažo plokštę. Informacijos išvedimui suprojektuota jungtis, skirta LCD ekrano pajungimui. Plokštėje taip pat numatytas pjezo garsiakalbis. Mikrovaldiklio programavimui yra numatytos specialios jungtys bei kabelis prisijungimui prie programatoriaus PICKIT 2. Jutikliams pagaminti specialūs laikikliai, kurie lengvai montuojasi prie roboto bazės. Kiekvienas jutiklis turi paruoštą kabelį su specialiomis jungtimis. Šios jungtys jungia mikrovaldiklio plokštę su jutikliu. Kiekvienas jutiklis buvo išbandytas. Bandymų rezultatai buvo panaudoti rašant programinę įrangą. Visi kiti įrenginiai montuojami roboto bazės viduje. Programine įranga susideda iš kelių demonstracinių programų. Kiekviena demonstracinė programinė įranga atvaizduoja jutiklių arba kitų prijungtų įrenginių veikimo principą. Pirma programinė įranga pavaizduoja kaip veikia linijos sekimo jutiklis. Antra programinė įranga parodo analoginio SHARP GP2 infraraudonųjų spindulių jutiklio veikimo principą. Trečia programinė įranga parodo kaip galima panaudoti kelis vienu metu veikiančius ultragarsinius jutiklius. Darant šią roboto bazę gavau daug patirties projektuojant spausdinto montažo plokštes. Gavau žinių kaip teisingai užprogramuoti jutiklių tinklą, prijungtą prie mikrovaldiklio.
44 44 LITERATŪRA 1. VEX Classroom Lab Kit [Žiūrėta ] Prieiga per internetą: < 2. VEX Documentation [Žiūrėta ] Prieiga per internetą: < 3. VEX Programing [Žiūrėta ] Prieiga per internetą: < 4. FischerTechnik [Žiūrėta ] Prieiga per internetą: < 5. FischerTechnik Robotics building Blocks [Žiūrėta ] Prieiga per internetą: < 6. USB (Universal Serial Bus) [Žiūrėta ] Prieiga per internetą: < 7. SHARP GP2 IR Sensor [Žiūrėta ] Prieiga per internetą: < 8. SHARP GP2 IR Sensor datasheet [Žiūrėta ] Prieiga per internetą: < 9. Ultragarsas ir jo panaudojimas [Žiūrėta ] Prieiga per internetą: < 10. Ultrasonic raging module HC-SR04 [Žiūrėta ] Prieiga per internetą: < 11. Ultrasonic raging module HC-SR04 [Žiūrėta ] Prieiga per internetą: < 12. LM2576 datasheet [Žiūrėta ] Prieiga per internetą: < 13. LM2575 datasheet [Žiūrėta ] Prieiga per internetą: < 14. LITERON Phototransistors [Žiūrėta ] Prieiga per internetą: < A9E0?OpenDocument&wg=X3745&refDoc=CMS8DAF CE025C12570C8004EA14 1> 15. LM339 datasheet [Žiūrėta ] Prieiga per internetą: <
45 NE555 datasheet [Žiūrėta ] Prieiga per internetą: < 17. TSOP 1736 datasheet [Žiūrėta ] Prieiga per internetą: < 18. L293D datasheet [Žiūrėta ] Prieiga per internetą: <
46 46 PRIEDAI
47 47 1 PRIEDAS 1A ir 3A įtampos reguliatoriai, elektrinės principinės schemos 1A įtampos reguliatorius 3A įtampos reguliatorius Mastelis Raidė Masė TECHNOLOGIJOS ŠU FAKULTETAS 2012 Lapas Lapų 1 7 Diplomantas Vadovas Konsultantas Recenzentas Kat. vedėjas Pavardė A. Abramovich N. Ramanauskas D. Balbonas G. Daunys Parašas Data Roboto bazė mokymams
 2 PRIEDAS 1A įtampos reguliatorius 3A įtampos")
48 48 1A ir 3A įtampos reguliatoriai, detalių išdėstymas, vaizdas iš viršaus (M 2:1) 2 PRIEDAS 1A įtampos reguliatorius 3A įtampos reguliatorius


49 49 1A ir 3A įtampos reguliatoriai, spausdinto montažo plokštės (M 2:1) 3 PRIEDAS 1A įtampos reguliatorius 3A įtampos reguliatorius
50 50 4 PRIEDAS Variklių valdymo grandinė, elektrinė principinė schema Mastelis Raidė Masė TECHNOLOGIJOS ŠU FAKULTETAS 2012 Lapas Lapų 2 7 Diplomantas Vadovas Konsultantas Recenzentas Kat. vedėjas Pavardė A. Abramovich N. Ramanauskas D. Balbonas G. Daunys Parašas Data Roboto bazė mokymams
51 51 Variklių valdymo grandinė, detalių išdėstymas, vaizdas iš viršaus (M 2:1) 5 PRIEDAS
52 52 Variklių valdymo grandinė, spausdinto montažo plokštė (M 2:1) 6 PRIEDAS
53 53
54 54 Infraraudonųjų spindulių jutiklis, detalių išdėstymas, vaizdas iš viršaus (M 2:1) 8 PRIEDAS

 9")
55 55 1 sluoksnis: Infraraudonųjų spindulių jutiklis, spausdinto montažo plokštė (M 2:1) 9 PRIEDAS 2 sluoksnis:
ROBOTO ERDVINIO JUDESIO JUTIKLIO TYRIMAS
 KAUNO TECHNOLOGIJOS UNIVERSITETAS PANEVĖŽIO TECHNOLOGIJŲ IR VERSLO FAKULTETAS Arvydas Gaurilka ROBOTO ERDVINIO JUDESIO JUTIKLIO TYRIMAS Baigiamasis magistro projektas Vadovas Prof. Vytenis Sinkevičius
KAUNO TECHNOLOGIJOS UNIVERSITETAS PANEVĖŽIO TECHNOLOGIJŲ IR VERSLO FAKULTETAS Arvydas Gaurilka ROBOTO ERDVINIO JUDESIO JUTIKLIO TYRIMAS Baigiamasis magistro projektas Vadovas Prof. Vytenis Sinkevičius
75 Atspaudas/Offprint Patrauklios kaimo aplinkos išsaugojimas ir formavimas Sargeliai: Kruenta ISBN
 Should the Greed of Man Come before the Need of Nature? Mark Selby As a native Englishman, and having lived in Lithuania for nearly 5 years, I have come to love this beautiful country. The diversity of
Should the Greed of Man Come before the Need of Nature? Mark Selby As a native Englishman, and having lived in Lithuania for nearly 5 years, I have come to love this beautiful country. The diversity of
APP Inventor. Piešimo aplikacija
 APP Inventor. Piešimo aplikacija Prisijungimas prie AppInventor Designer Prisijunkite prie AppInventor Designer šiuo adresu: http://ai2.appinventor.mit.edu Pradėkite naują projektą StartNewProject Pateiktame
APP Inventor. Piešimo aplikacija Prisijungimas prie AppInventor Designer Prisijunkite prie AppInventor Designer šiuo adresu: http://ai2.appinventor.mit.edu Pradėkite naują projektą StartNewProject Pateiktame
OUTDOOR WIRELESS SIREN BELAIDĖ LAUKO SIRENA EWS2
 OUTDOOR WIRELESS SIREN BELAIDĖ LAUKO SIRENA EWS2 Outdoor wireless siren EWS2 is external power supplied siren with integrated wireless module EW1. This wireless module EW1 connects to ELDES wireless security
OUTDOOR WIRELESS SIREN BELAIDĖ LAUKO SIRENA EWS2 Outdoor wireless siren EWS2 is external power supplied siren with integrated wireless module EW1. This wireless module EW1 connects to ELDES wireless security
METODINIAI NURODYMAI
 PATVIRTINTA: Elektronikos ir informatikos fakulteto dekano 2016 m. rugsėjo 16 d. įsakymu Nr. EI V2-51 VILNIAUS KOLEGIJA ELEKTRONIKOS IR INFORMATIKOS FAKULTETAS KOMPIUTERIŲ SISTEMŲ IR TELEKOMUNIKACIJŲ KATEDRA
PATVIRTINTA: Elektronikos ir informatikos fakulteto dekano 2016 m. rugsėjo 16 d. įsakymu Nr. EI V2-51 VILNIAUS KOLEGIJA ELEKTRONIKOS IR INFORMATIKOS FAKULTETAS KOMPIUTERIŲ SISTEMŲ IR TELEKOMUNIKACIJŲ KATEDRA
INDOOR WIRELESS SIREN BELAIDĖ VIDAUS SIRENA EWS1
 INDOOR WIRELESS SIREN BELAIDĖ VIDAUS SIRENA EWS1 Indoor wireless sirens EWS1 are wireless devices with integrated siren speakers which are used for operating ELDES wireless security systems. Users have
INDOOR WIRELESS SIREN BELAIDĖ VIDAUS SIRENA EWS1 Indoor wireless sirens EWS1 are wireless devices with integrated siren speakers which are used for operating ELDES wireless security systems. Users have
MOKYKLŲ TYRIMAS: INFORMACINĖS IR KOMUNIKACINĖS TECHNOLOGIJOS (IKT) ŠVIETIME
 ŠVIETIME") MOKYKLŲ TYRIMAS: INFORMACINĖS IR KOMUNIKACINĖS TECHNOLOGIJOS (IKT) ŠVIETIME INFORMACIJA APIE LIETUVĄ 2012 m. lapkritis Šią ataskaitą parengė Europos mokyklų tinklas ( European Schoolnet ) ir Liège universitetas
MOKYKLŲ TYRIMAS: INFORMACINĖS IR KOMUNIKACINĖS TECHNOLOGIJOS (IKT) ŠVIETIME INFORMACIJA APIE LIETUVĄ 2012 m. lapkritis Šią ataskaitą parengė Europos mokyklų tinklas ( European Schoolnet ) ir Liège universitetas
OH720, OP720, HI720, HI722 Automatiniai gaisro detektoriai
 OH720, OP720, HI720, HI722 Automatiniai gaisro detektoriai Automatiškai adresuojamų detektorių magistralei C-NET Cerberus PRO Optimalus dūmų detektorius tinkamas visoms patalpoms Automatiškas adreso priskyrimas
OH720, OP720, HI720, HI722 Automatiniai gaisro detektoriai Automatiškai adresuojamų detektorių magistralei C-NET Cerberus PRO Optimalus dūmų detektorius tinkamas visoms patalpoms Automatiškas adreso priskyrimas
Stirlingo variklis. Darbo tikslai ir uždaviniai. Sprendžiamos problemos apžvalga. Tikslas: Stirlingo variklio sukonstravimas.
 Stirlingo variklis Darbo tikslai ir uždaviniai Tikslas: Stirlingo variklio sukonstravimas. Uždaviniai: Išanalizuoti skirtingų Stirlingo variklių veikimo principus. Išnagrinėti Stirlingo variklių gamybos
Stirlingo variklis Darbo tikslai ir uždaviniai Tikslas: Stirlingo variklio sukonstravimas. Uždaviniai: Išanalizuoti skirtingų Stirlingo variklių veikimo principus. Išnagrinėti Stirlingo variklių gamybos
KAUNO TECHNOLOGIJOS UNIVERSITETAS NUOTOLINIS DALINIŲ IŠLYDŽIŲ APTIKIMAS ELEKTROS ENERGIJOS ĮRENGINIUOSE IR JŲ VIETOS NUSTATYMAS ULTRAGARSU
 KAUNO TECHNOLOGIJOS UNIVERSITETAS ELEKTROS IR ELEKTRONIKOS FAKULTETAS Gediminas Alešiūnas NUOTOLINIS DALINIŲ IŠLYDŽIŲ APTIKIMAS ELEKTROS ENERGIJOS ĮRENGINIUOSE IR JŲ VIETOS NUSTATYMAS ULTRAGARSU Baigiamasis
KAUNO TECHNOLOGIJOS UNIVERSITETAS ELEKTROS IR ELEKTRONIKOS FAKULTETAS Gediminas Alešiūnas NUOTOLINIS DALINIŲ IŠLYDŽIŲ APTIKIMAS ELEKTROS ENERGIJOS ĮRENGINIUOSE IR JŲ VIETOS NUSTATYMAS ULTRAGARSU Baigiamasis
Flexible Product Drying System Design and Application
 ELECTRONICS AND ELECTRICAL ENGINEERING ISSN 1392 1215 10. No. 10(106) ELEKTRONIKA IR ELEKTROTECHNIKA ELECTRICAL ENGINEERING T 190 ELEKTROS INŽINERIJA Flexible Product Drying System Design and Application
ELECTRONICS AND ELECTRICAL ENGINEERING ISSN 1392 1215 10. No. 10(106) ELEKTRONIKA IR ELEKTROTECHNIKA ELECTRICAL ENGINEERING T 190 ELEKTROS INŽINERIJA Flexible Product Drying System Design and Application
WIRELESS INDOOR SIREN BELAIDĖ VIDAUS SIRENA EWS1
 WIRELESS INDOOR SIREN BELAIDĖ VIDAUS SIRENA EWS1 EWS1 is a wireless device with built-in siren speaker and operates with ELDES wireless alarm systems. EWS1 has to be bind to the alarm system by sending
WIRELESS INDOOR SIREN BELAIDĖ VIDAUS SIRENA EWS1 EWS1 is a wireless device with built-in siren speaker and operates with ELDES wireless alarm systems. EWS1 has to be bind to the alarm system by sending
KAUNO TECHNOLOGIJOS UNIVERSITETAS. Automobilio greičio nustatymo tyrimas naudojant magnetorezistyvinius jutiklius
 KAUNO TECHNOLOGIJOS UNIVERSITETAS ELEKTROS IR ELEKTRONIKOS FAKULTETAS Jogundas Juškys Automobilio greičio nustatymo tyrimas naudojant magnetorezistyvinius jutiklius Magistro projektas Vadovas prof. dr.
KAUNO TECHNOLOGIJOS UNIVERSITETAS ELEKTROS IR ELEKTRONIKOS FAKULTETAS Jogundas Juškys Automobilio greičio nustatymo tyrimas naudojant magnetorezistyvinius jutiklius Magistro projektas Vadovas prof. dr.
MAGNETIC DOOR CONTACT MAGNETINIS DURŲ KONTAKTAS EWD1
 MAGNETIC DOOR CONTACT MAGNETINIS DURŲ KONTAKTAS EWD1 Magnetic door contact with panic button EWD1 is a wireless device with magnetic contact which are used to secure doors, windows or any other opening
MAGNETIC DOOR CONTACT MAGNETINIS DURŲ KONTAKTAS EWD1 Magnetic door contact with panic button EWD1 is a wireless device with magnetic contact which are used to secure doors, windows or any other opening
WIRELESS ZONE & PGM OUTPUT EXPANSION MODULE BELAIDIS ZONŲ IR PGM IŠĖJIMŲ IŠPLĖTIMO MODULIS EW1
 WIRELESS ZONE & PGM OUTPUT EXPANSION MODULE BELAIDIS ZONŲ IR PGM IŠĖJIMŲ IŠPLĖTIMO MODULIS EW1 Wireless expansion module EW1 is a wireless device with 2 zones and 2 PGM outputs. This expansion module connects
WIRELESS ZONE & PGM OUTPUT EXPANSION MODULE BELAIDIS ZONŲ IR PGM IŠĖJIMŲ IŠPLĖTIMO MODULIS EW1 Wireless expansion module EW1 is a wireless device with 2 zones and 2 PGM outputs. This expansion module connects
WIRELESS KEY-FOB BELAIDIS PULTELIS EWK1
 WIRELESS KEY-FOB BELAIDIS PULTELIS EWK1 User Manual v1.1 Compatible with: ESIM264 v7.09.02 and up + EWT1 v16.14 and up. EPIR v05.03.01 and up + EWT2 v16.14 and up. ESIM364. For more details, please refer
WIRELESS KEY-FOB BELAIDIS PULTELIS EWK1 User Manual v1.1 Compatible with: ESIM264 v7.09.02 and up + EWT1 v16.14 and up. EPIR v05.03.01 and up + EWT2 v16.14 and up. ESIM364. For more details, please refer
1 Pagrindinės sąvokos
 This project funded by Leonardo da Vinci has been carried out with the support of the European Community. The content of this project does not necessarily reflect the position of the European Community
This project funded by Leonardo da Vinci has been carried out with the support of the European Community. The content of this project does not necessarily reflect the position of the European Community
MIDEA ORO KONDICIONIERIAUS NUOTOLINIO VALDYMO PULTO NAUDOJIMO INSTRUKCIJA
 MIDEA ORO KONDICIONIERIAUS NUOTOLINIO VALDYMO PULTO NAUDOJIMO INSTRUKCIJA Split tipas MSR-09HRN1 MSR-12HRN1 MSR-18HRN1 MSR-24HRN1 MSR-28HRN1 Dėkojame, kad įsigyjote mūsų oro kondicionierių. Prieš pradėdami
MIDEA ORO KONDICIONIERIAUS NUOTOLINIO VALDYMO PULTO NAUDOJIMO INSTRUKCIJA Split tipas MSR-09HRN1 MSR-12HRN1 MSR-18HRN1 MSR-24HRN1 MSR-28HRN1 Dėkojame, kad įsigyjote mūsų oro kondicionierių. Prieš pradėdami
PIR SENSOR PIR DAVIKLIAI EWP1
 PIR SENSOR PIR DAVIKLIAI EWP1 PIR sensors EWP1 are wireless devices with integrated motion detectors that are used for operating ELDES wireless security systems. These sensors allow expanding security
PIR SENSOR PIR DAVIKLIAI EWP1 PIR sensors EWP1 are wireless devices with integrated motion detectors that are used for operating ELDES wireless security systems. These sensors allow expanding security
VILNIAUS PEDAGOGINIS UNIVERSITETAS FIZIKOS IR TECHNOLOGIJOS FAKULTETAS BENDROSIOS TECHNOLOGIJOS KATEDRA
 VILNIAUS PEDAGOGINIS UNIVERSITETAS FIZIKOS IR TECHNOLOGIJOS FAKULTETAS BENDROSIOS TECHNOLOGIJOS KATEDRA INFORMACINIŲ SISTEMŲ TAIKYMAS TECHNOLOGIJŲ MOKYMO PROCESE APPLICATION OF INFORMATION SYSTEMS IN TECHNOLOGY
VILNIAUS PEDAGOGINIS UNIVERSITETAS FIZIKOS IR TECHNOLOGIJOS FAKULTETAS BENDROSIOS TECHNOLOGIJOS KATEDRA INFORMACINIŲ SISTEMŲ TAIKYMAS TECHNOLOGIJŲ MOKYMO PROCESE APPLICATION OF INFORMATION SYSTEMS IN TECHNOLOGY
INFORMACINIŲ TECHNOLOGIJŲ TAIKYMAI AUTOMOBILYJE
 VILNIAUS PEDAGOGINIS UNIVERSITETAS MATEMATIKOS IR INFORMATIKOS FAKULTETAS INFORMATIKOS KATEDRA Tomas Šepetys INFORMACINIŲ TECHNOLOGIJŲ TAIKYMAI AUTOMOBILYJE magistro diplominis darbas Darbo vadovė prof.
VILNIAUS PEDAGOGINIS UNIVERSITETAS MATEMATIKOS IR INFORMATIKOS FAKULTETAS INFORMATIKOS KATEDRA Tomas Šepetys INFORMACINIŲ TECHNOLOGIJŲ TAIKYMAI AUTOMOBILYJE magistro diplominis darbas Darbo vadovė prof.
LAUKO APŠVIETIMO ATNAUJINIMAS VIEŠAJAME SEKTORIUJE
 Aleksandras Plešanovas UAB Viltechna Tel. (8 686) 07055, el. p. aleksandras@viltechna.lt, www.viltechna.lt LAUKO APŠVIETIMO ATNAUJINIMAS VIEŠAJAME SEKTORIUJE 2015 m. lapkričio 26d., Vilnius Konferencija
Aleksandras Plešanovas UAB Viltechna Tel. (8 686) 07055, el. p. aleksandras@viltechna.lt, www.viltechna.lt LAUKO APŠVIETIMO ATNAUJINIMAS VIEŠAJAME SEKTORIUJE 2015 m. lapkričio 26d., Vilnius Konferencija
Multimedijos priemonių panaudojimas e. mokymosi profesinio rengimo kursuose
 KAUNO TECHNOLOGIJOS UNIVERSITETAS INFORMATIKOS FAKULTETAS MULTIMEDIJOS INŽINERIJOS KATEDRA Danguolė Leščinskienė Multimedijos priemonių panaudojimas e. mokymosi profesinio rengimo kursuose Magistro darbas
KAUNO TECHNOLOGIJOS UNIVERSITETAS INFORMATIKOS FAKULTETAS MULTIMEDIJOS INŽINERIJOS KATEDRA Danguolė Leščinskienė Multimedijos priemonių panaudojimas e. mokymosi profesinio rengimo kursuose Magistro darbas
GAMYBOS LOGISTIKA GAMYBOS VADYBA
 Projektas Socialinių mokslų kolegijos studijų tarptautiškumo skatinimas atnaujinant darbo rinkoje paklausias studijų programas (projekto Nr. VP1-2.2-ŠMM-07-K-02-035) finansuojamas pagal 2007 2013 m. Žmogiškųjų
Projektas Socialinių mokslų kolegijos studijų tarptautiškumo skatinimas atnaujinant darbo rinkoje paklausias studijų programas (projekto Nr. VP1-2.2-ŠMM-07-K-02-035) finansuojamas pagal 2007 2013 m. Žmogiškųjų
Visuomenės sveikatos programų vertinimas
 Visuomenės sveikata Literatūros apžvalga Visuomenės sveikatos programų Rasa Povilanskienė, Vytautas Jurkuvėnas Higienos institutas Santrauka Pagrindinis visuomenės sveikatos programų tikslas yra susirgimų
Visuomenės sveikata Literatūros apžvalga Visuomenės sveikatos programų Rasa Povilanskienė, Vytautas Jurkuvėnas Higienos institutas Santrauka Pagrindinis visuomenės sveikatos programų tikslas yra susirgimų
FAVORIT VI. Naudojimo instrukcija. Indaplovė
 FAVORIT 60010 VI User manual Naudojimo instrukcija Návod na používanie Dishwasher Indaplovė Umývačka riadu 2 Contents Thank you for choosing one of our high-quality products. To ensure optimal and regular
FAVORIT 60010 VI User manual Naudojimo instrukcija Návod na používanie Dishwasher Indaplovė Umývačka riadu 2 Contents Thank you for choosing one of our high-quality products. To ensure optimal and regular
KAUNO TECHNOLOGIJOS UNIVERSITETAS ELEKTROS IR ELEKTRONIKOS FAKULTETAS GOFRO KARTONO GAMINIŲ VAIZDINĖS ANALIZĖS SISTEMOS KŪRIMAS IR TYRIMAS
 KAUNO TECHNOLOGIJOS UNIVERSITETAS ELEKTROS IR ELEKTRONIKOS FAKULTETAS Benas Linkevičius GOFRO KARTONO GAMINIŲ VAIZDINĖS ANALIZĖS SISTEMOS KŪRIMAS IR TYRIMAS Baigiamasis magistro projektas Vadovas prof.
KAUNO TECHNOLOGIJOS UNIVERSITETAS ELEKTROS IR ELEKTRONIKOS FAKULTETAS Benas Linkevičius GOFRO KARTONO GAMINIŲ VAIZDINĖS ANALIZĖS SISTEMOS KŪRIMAS IR TYRIMAS Baigiamasis magistro projektas Vadovas prof.
Optimalūs projektavimo/skaičiavimo programų rinkinys pramonės įrenginių projektavimui. Andrej Jarmolajev, IN RE UAB,
 Optimalūs projektavimo/skaičiavimo programų rinkinys pramonės įrenginių projektavimui Andrej Jarmolajev, IN RE UAB, 2011.04.26 Apie UAB IN RE PAVADINIMAS UAB IN RE ĮKURTA 1996 m. lapkričio 26 d. MUS RASITE
Optimalūs projektavimo/skaičiavimo programų rinkinys pramonės įrenginių projektavimui Andrej Jarmolajev, IN RE UAB, 2011.04.26 Apie UAB IN RE PAVADINIMAS UAB IN RE ĮKURTA 1996 m. lapkričio 26 d. MUS RASITE
Naujausių informacinių technologijų naudojimas švietime
 LIETUVOS EDUKOLOGIJOS UNIVERSITETAS GAMTOS, MATEMATIKOS IR TECHNOLOGIJŲ FAKULTETAS INFORMATIKOS KATEDRA ANDRIUS MARKEVIČIUS Naujausių informacinių technologijų naudojimas švietime Magistro baigiamasis
LIETUVOS EDUKOLOGIJOS UNIVERSITETAS GAMTOS, MATEMATIKOS IR TECHNOLOGIJŲ FAKULTETAS INFORMATIKOS KATEDRA ANDRIUS MARKEVIČIUS Naujausių informacinių technologijų naudojimas švietime Magistro baigiamasis
REALAUS LAIKO SISTEMOS
 Kauno technologijos universitetas Kompiuterių katedra REALAUS LAIKO SISTEMOS Trumpos Advantech GeniDAQ paketo naudojimo pamokos prof. dr.e. Kazanavičius Kaunas 2017 TURINYS Įvadas...2 1 pamoka: Vienas
Kauno technologijos universitetas Kompiuterių katedra REALAUS LAIKO SISTEMOS Trumpos Advantech GeniDAQ paketo naudojimo pamokos prof. dr.e. Kazanavičius Kaunas 2017 TURINYS Įvadas...2 1 pamoka: Vienas
DUOMENŲ BAZIŲ PROJEKTAVIMAS
 DAIVA KALVAITIENĖ DUOMENŲ BAZIŲ PROJEKTAVIMAS Mokymo(si) rinkinys DAIVA KALVAITIENĖ DUOMENŲ BAZIŲ PROJEKTAVIMAS Mokymo(si) rinkinys Marijampolė, 2012 ĮVADAS Duomenų bazių projektavimo kursas įtrauktas
DAIVA KALVAITIENĖ DUOMENŲ BAZIŲ PROJEKTAVIMAS Mokymo(si) rinkinys DAIVA KALVAITIENĖ DUOMENŲ BAZIŲ PROJEKTAVIMAS Mokymo(si) rinkinys Marijampolė, 2012 ĮVADAS Duomenų bazių projektavimo kursas įtrauktas
APLINKOS TRIUKŠMO IR JO MAŽINIMO, TAIKANT LENGVAS KONSTRUKCIJAS, TYRIMAI BEI SKAITINIS MODELIAVIMAS
 VILNIAUS GEDIMINO TECHNIKOS UNIVERSITETAS Raimondas GRUBLIAUSKAS APLINKOS TRIUKŠMO IR JO MAŽINIMO, TAIKANT LENGVAS KONSTRUKCIJAS, TYRIMAI BEI SKAITINIS MODELIAVIMAS DAKTARO DISERTACIJA TECHNOLOGIJOS MOKSLAI,
VILNIAUS GEDIMINO TECHNIKOS UNIVERSITETAS Raimondas GRUBLIAUSKAS APLINKOS TRIUKŠMO IR JO MAŽINIMO, TAIKANT LENGVAS KONSTRUKCIJAS, TYRIMAI BEI SKAITINIS MODELIAVIMAS DAKTARO DISERTACIJA TECHNOLOGIJOS MOKSLAI,
KAUNO TECHNOLOGIJOS UNIVERSITETAS INFORMATIKOS FAKULTETAS PRAKTINĖS INFORMATIKOS KATEDRA
 KAUNO TECHNOLOGIJOS UNIVERSITETAS INFORMATIKOS FAKULTETAS PRAKTINĖS INFORMATIKOS KATEDRA Dalia Remeikienė INFORMACINĖS VERSLO SISTEMOS IR MODELIAVIMO APLINKA NUOTOLINĖMS VERSLO INFORMATIKOS STUDIJOMS Magistro
KAUNO TECHNOLOGIJOS UNIVERSITETAS INFORMATIKOS FAKULTETAS PRAKTINĖS INFORMATIKOS KATEDRA Dalia Remeikienė INFORMACINĖS VERSLO SISTEMOS IR MODELIAVIMO APLINKA NUOTOLINĖMS VERSLO INFORMATIKOS STUDIJOMS Magistro
GREITO NAUDOJIMO INSTRUKCIJA NUOTOLINIS VALDIKLIS BRC1E51. Dokumentas 4PW
 GREITO NAUDOJIMO INSTRUKCIJA NUOTOLINIS VALDIKLIS BRC1E51 Dokumentas 4PW52905-1 MONTAVIMAS Informacija apie nuotolinio valdiklio naudojimą pateikta antroje šios greito naudojimo instrukcijos dalyje.
GREITO NAUDOJIMO INSTRUKCIJA NUOTOLINIS VALDIKLIS BRC1E51 Dokumentas 4PW52905-1 MONTAVIMAS Informacija apie nuotolinio valdiklio naudojimą pateikta antroje šios greito naudojimo instrukcijos dalyje.
LIETUVOS ŪKIŲ KONKURENCINGUMAS IR ES PARAMOS ĮTAKA. Irena Kriščiukaitienė Lietuvos agrarinės ekonomikos institutas
 LIETUVOS ŪKIŲ KONKURENCINGUMAS IR ES PARAMOS ĮTAKA Irena Kriščiukaitienė Lietuvos agrarinės ekonomikos institutas Šiame straipsnyje pateikta medžiaga iš 2007 metų tyrimo Ūkių ir įmonių ekonominio konkurencingumo
LIETUVOS ŪKIŲ KONKURENCINGUMAS IR ES PARAMOS ĮTAKA Irena Kriščiukaitienė Lietuvos agrarinės ekonomikos institutas Šiame straipsnyje pateikta medžiaga iš 2007 metų tyrimo Ūkių ir įmonių ekonominio konkurencingumo
Jolanta Balčiūnaitė INTERAKTYVIŲ TECHNOLOGIJŲ TAIKYMAS DĖSTANT FIZIKĄ ŽEMESNĖSE KLASĖSE. Magistro darbas
 KAUNO TECHNOLOGIJOS UNIVERSITETAS INFORMATIKOS FAKULTETAS KOMPIUTERIŲ TINKLŲ KATEDRA Jolanta Balčiūnaitė INTERAKTYVIŲ TECHNOLOGIJŲ TAIKYMAS DĖSTANT FIZIKĄ ŽEMESNĖSE KLASĖSE Magistro darbas Recenzentas
KAUNO TECHNOLOGIJOS UNIVERSITETAS INFORMATIKOS FAKULTETAS KOMPIUTERIŲ TINKLŲ KATEDRA Jolanta Balčiūnaitė INTERAKTYVIŲ TECHNOLOGIJŲ TAIKYMAS DĖSTANT FIZIKĄ ŽEMESNĖSE KLASĖSE Magistro darbas Recenzentas
ILGALAIKIO MATERIALIOJO TURTO KOMPLEKSINĖS ANALIZĖS METODIKA
 Verslas: Teorija ir praktika Business: Theory and Practice 2008 9(4): 237 244 ILGALAIKIO MATERIALIOJO TURTO KOMPLEKSINĖS ANALIZĖS METODIKA Jonas Mackevičius Vilniaus universitetas, Saulėtekio al. 9, LT-10222
Verslas: Teorija ir praktika Business: Theory and Practice 2008 9(4): 237 244 ILGALAIKIO MATERIALIOJO TURTO KOMPLEKSINĖS ANALIZĖS METODIKA Jonas Mackevičius Vilniaus universitetas, Saulėtekio al. 9, LT-10222
EW1B. Wireless Zone & PGM Output Expansion Module Belaidis zonų ir PGM išėjimų išplėtimo modulis
 Тел: +7 495 7907870 Моб: +7 965 4429948 Skype: Discoverytelecom Mail: info@discoverytelecom.ru www.discoverytelecom.ru Wireless Zone & PGM Output Expansion Module Belaidis zonų ir PGM išėjimų išplėtimo
Тел: +7 495 7907870 Моб: +7 965 4429948 Skype: Discoverytelecom Mail: info@discoverytelecom.ru www.discoverytelecom.ru Wireless Zone & PGM Output Expansion Module Belaidis zonų ir PGM išėjimų išplėtimo
AGENDA8 / Universitetai ir kolegijos Lietuvoje: kas jie tokie?
 8 / 2016 Universitetai ir kolegijos Lietuvoje: kas jie tokie? Valstybės biudžetinė įstaiga Mokslo ir studijų stebėsenos ir analizės centras (MOSTA) atlieka mokslo ir studijų sistemos stebėseną, rengia
8 / 2016 Universitetai ir kolegijos Lietuvoje: kas jie tokie? Valstybės biudžetinė įstaiga Mokslo ir studijų stebėsenos ir analizės centras (MOSTA) atlieka mokslo ir studijų sistemos stebėseną, rengia
Vyresnių žmonių aktyvumo skatinimas darbo vietoje
 Vyresnių žmonių aktyvumo skatinimas darbo vietoje Prof. Juhani Ilmarinen, JIC Ltd, Jiuveskiul s universiteto Gerontologijos mokslinių tyrimų centras, Suomijos profesin s sveikatos institutas (1970 2008
Vyresnių žmonių aktyvumo skatinimas darbo vietoje Prof. Juhani Ilmarinen, JIC Ltd, Jiuveskiul s universiteto Gerontologijos mokslinių tyrimų centras, Suomijos profesin s sveikatos institutas (1970 2008
LIETUVOS ŽEMĖS ŪKIO UNIVERSITETAS. Ekonomikos ir vadybos fakultetas
 LIETUVOS ŽEMĖS ŪKIO UNIVERSITETAS Ekonomikos ir vadybos fakultetas Administravimo ir kaimo plėtros katedra STUDIJŲ DALYKO APRAŠAS Dalyko kodas: EVAKB32E Pavadinimas lietuvių kalba: Kaimo plėtros ir regioninė
LIETUVOS ŽEMĖS ŪKIO UNIVERSITETAS Ekonomikos ir vadybos fakultetas Administravimo ir kaimo plėtros katedra STUDIJŲ DALYKO APRAŠAS Dalyko kodas: EVAKB32E Pavadinimas lietuvių kalba: Kaimo plėtros ir regioninė
Veiklos taisyklių specifikavimo šablonais metodika ir jų manipuliavimo tyrimas Magistro tezės
 KAUNO TECHNOLOGIJOS UNIVERSITETAS INFORMATIKOS FAKULTETAS INFORMACIJOS SISTEMŲ KATEDRA Agnė Ručinskaitė Veiklos taisyklių specifikavimo šablonais metodika ir jų manipuliavimo tyrimas Magistro tezės Darbo
KAUNO TECHNOLOGIJOS UNIVERSITETAS INFORMATIKOS FAKULTETAS INFORMACIJOS SISTEMŲ KATEDRA Agnė Ručinskaitė Veiklos taisyklių specifikavimo šablonais metodika ir jų manipuliavimo tyrimas Magistro tezės Darbo
KELIŲ TINKLO GEOGRAFINĖ INFORMACINĖ SISTEMA Magistro darbas
 KAUNO TECHNOLOGIJOS UNIVERSITETAS INFORMATIKOS FAKULTETAS INFORMACIJOS SISTEMŲ KATEDRA Kristina Lipnevičiūtė KELIŲ TINKLO GEOGRAFINĖ INFORMACINĖ SISTEMA Magistro darbas Vadovas: doc.rimantas Butleris KAUNAS,
KAUNO TECHNOLOGIJOS UNIVERSITETAS INFORMATIKOS FAKULTETAS INFORMACIJOS SISTEMŲ KATEDRA Kristina Lipnevičiūtė KELIŲ TINKLO GEOGRAFINĖ INFORMACINĖ SISTEMA Magistro darbas Vadovas: doc.rimantas Butleris KAUNAS,
ANALYSIS OF THE FIRE FIGHTING ROBOT
 2011 ANALYSIS OF THE FIRE FIGHTING ROBOT, AR-4 EEL4665/5666c 2011-12-6 Content ABSTRACT... 2 EXLCUSIVE SUMMARY... 3 INTRODUCTION... 4 INTEGRATED SYSTEM... 4 MOBILE PLATFORM... 5 ACTUATION... 6 SENSORS...
2011 ANALYSIS OF THE FIRE FIGHTING ROBOT, AR-4 EEL4665/5666c 2011-12-6 Content ABSTRACT... 2 EXLCUSIVE SUMMARY... 3 INTRODUCTION... 4 INTEGRATED SYSTEM... 4 MOBILE PLATFORM... 5 ACTUATION... 6 SENSORS...
Style and Harmony of Urban Green Space Landscape
 Style and Harmony of Urban Green Space Landscape Aija Ziemeļniece* Latvian University of Agriculture Akademija str. 19, LV-3001 Jelgava, Latvia, e-mail aija@k-projekts.lv (Received in January, 2012; Accepted
Style and Harmony of Urban Green Space Landscape Aija Ziemeļniece* Latvian University of Agriculture Akademija str. 19, LV-3001 Jelgava, Latvia, e-mail aija@k-projekts.lv (Received in January, 2012; Accepted
LIETUVOS RESPUBLIKOS VALSTYBĖS KONTROLĖ INFORMACINIŲ SISTEMŲ AUDITO VADOVAS. Lietuvos Respublikos valstybės kontrolė
 1 LIETUVOS RESPUBLIKOS VALSTYBĖS KONTROLĖ INFORMACINIŲ SISTEMŲ AUDITO VADOVAS Vilnius 2013 Lietuvos Respublikos valstybės kontrolė Informacinių sistemų audito vadovas Turinys 1. Informacinių sistemų audito
1 LIETUVOS RESPUBLIKOS VALSTYBĖS KONTROLĖ INFORMACINIŲ SISTEMŲ AUDITO VADOVAS Vilnius 2013 Lietuvos Respublikos valstybės kontrolė Informacinių sistemų audito vadovas Turinys 1. Informacinių sistemų audito
Wireless Zone & PGM Output Expansion Module Belaidis zonų ir PGM išėjimų išplėtimo modulis EW1B
 Wireless Zone & PGM Output Expansion Module Belaidis zonų ir PGM išėjimų išplėtimo modulis EW1B Wireless expansion module EW1B is a wireless device with 2 zones and 2 PGM outputs. This expansion module
Wireless Zone & PGM Output Expansion Module Belaidis zonų ir PGM išėjimų išplėtimo modulis EW1B Wireless expansion module EW1B is a wireless device with 2 zones and 2 PGM outputs. This expansion module
Izoliuotų gaminių mokslinių eksperimentinių tyrimų rezultatai. Mokslinių tyrimų ir eksperimentinės plėtros slėnio Santaka reikšmė ir perspektyvos
 Izoliuotų gaminių mokslinių eksperimentinių tyrimų rezultatai. Mokslinių tyrimų ir eksperimentinės plėtros slėnio Santaka reikšmė ir perspektyvos Dr. Rimantas Levinskas AB Nepriklausomos energijos paslaugos
Izoliuotų gaminių mokslinių eksperimentinių tyrimų rezultatai. Mokslinių tyrimų ir eksperimentinės plėtros slėnio Santaka reikšmė ir perspektyvos Dr. Rimantas Levinskas AB Nepriklausomos energijos paslaugos
MOKYKLOS INFORMACINĖ SISTEMA KAIP MOKYKLOS VALDYMO ĮRANKIS
 ŠVIETIMO PROBLEMOS ANALIZĖ 2011, gruodis Nr. 12 (62) ISSN 1822-4156 MOKYKLOS INFORMACINĖ SISTEMA KAIP MOKYKLOS VALDYMO ĮRANKIS Lietuvos Respublikos švietimo ir mokslo ministerija Pagrindiniai klausimai:
ŠVIETIMO PROBLEMOS ANALIZĖ 2011, gruodis Nr. 12 (62) ISSN 1822-4156 MOKYKLOS INFORMACINĖ SISTEMA KAIP MOKYKLOS VALDYMO ĮRANKIS Lietuvos Respublikos švietimo ir mokslo ministerija Pagrindiniai klausimai:
Serija: Intelektinė nuosavybė verslui KURIANT ATEITĮ. Įvadas į patentus smulkioms ir vidutinėms įmonėms
 Serija: Intelektinė nuosavybė verslui Numeris: 3 KURIANT ATEITĮ Įvadas į patentus smulkioms ir vidutinėms įmonėms Intelektinė nuosavybė verslui seriją sudarantys PINO leidiniai anglų kalba: Prekių ženklo
Serija: Intelektinė nuosavybė verslui Numeris: 3 KURIANT ATEITĮ Įvadas į patentus smulkioms ir vidutinėms įmonėms Intelektinė nuosavybė verslui seriją sudarantys PINO leidiniai anglų kalba: Prekių ženklo
Virginija Limanauskienė Kęstutis Motiejūnas. PrograMinės įrangos diegimo
 Virginija Limanauskienė Kęstutis Motiejūnas PrograMinės įrangos diegimo tyrimas Švietimo ir mokslo ministerija Virginija Limanauskienė Kęstutis Motiejūnas Programinės įrangos diegimo Tyrimas MOKOMOJI KNYGA
Virginija Limanauskienė Kęstutis Motiejūnas PrograMinės įrangos diegimo tyrimas Švietimo ir mokslo ministerija Virginija Limanauskienė Kęstutis Motiejūnas Programinės įrangos diegimo Tyrimas MOKOMOJI KNYGA
VETERINARINIO VAISTO APRAŠAS. kalcio gliukonato magnio hipofosfito heksahidrato gliukozės monohidrato boro rūgšties. pagalbinių medžiagų:
 VETERINARINIO VAISTO APRAŠAS 1. VETERINARINIO VAISTO PAVADINIMAS 2. KOKYBINĖ IR KIEKYBINĖ SUDĖTIS 1 ml tirpalo yra: veikliųjų medžiagų: kalcio gliukonato magnio hipofosfito heksahidrato gliukozės monohidrato
VETERINARINIO VAISTO APRAŠAS 1. VETERINARINIO VAISTO PAVADINIMAS 2. KOKYBINĖ IR KIEKYBINĖ SUDĖTIS 1 ml tirpalo yra: veikliųjų medžiagų: kalcio gliukonato magnio hipofosfito heksahidrato gliukozės monohidrato
Danfoss Eco Elektroninis radiatorių termostatas
 Eco Elektroninis radiatorių termostatas www.danfoss.com Montavimo vadovas 1. Montavimas 1.1 Nustatykite savo Eco...4 1.2 Pakuotėje...5 1.3 Ventilių adapterių apžvalga...5 1.4 Tinkamo adapterio montavimas...7
Eco Elektroninis radiatorių termostatas www.danfoss.com Montavimo vadovas 1. Montavimas 1.1 Nustatykite savo Eco...4 1.2 Pakuotėje...5 1.3 Ventilių adapterių apžvalga...5 1.4 Tinkamo adapterio montavimas...7
KAUNO TECHNOLOGIJOS UNIVERSITETAS DINAMINIŲ INOVACINIŲ GEBĖJIMŲ VYSTYMAS SMULKAUS VIDUTINIO DYDŽIO ORGANIZACIJOJE: ATVEJO ANALIZĖ
 KAUNO TECHNOLOGIJOS UNIVERSITETAS EKONOMIKOS IR VERSLO FAKULTETAS Lina Galvanauskaitė DINAMINIŲ INOVACINIŲ GEBĖJIMŲ VYSTYMAS SMULKAUS VIDUTINIO DYDŽIO ORGANIZACIJOJE: ATVEJO ANALIZĖ Magistro darbas Darbo
KAUNO TECHNOLOGIJOS UNIVERSITETAS EKONOMIKOS IR VERSLO FAKULTETAS Lina Galvanauskaitė DINAMINIŲ INOVACINIŲ GEBĖJIMŲ VYSTYMAS SMULKAUS VIDUTINIO DYDŽIO ORGANIZACIJOJE: ATVEJO ANALIZĖ Magistro darbas Darbo
KAUNO TECHNOLOGIJOS UNIVERSITETAS INFORMATIKOS FAKULTETAS KOMPIUTERIŲ TINKLŲ KATEDRA
 KAUNO TECHNOLOGIJOS UNIVERSITETAS INFORMATIKOS FAKULTETAS KOMPIUTERIŲ TINKLŲ KATEDRA Lina Rentelienė Imagine Logo taikymas programavimo mokyme Magistro darbas Recenzentas doc. dr. S. Maciulevičius 2010-05-31
KAUNO TECHNOLOGIJOS UNIVERSITETAS INFORMATIKOS FAKULTETAS KOMPIUTERIŲ TINKLŲ KATEDRA Lina Rentelienė Imagine Logo taikymas programavimo mokyme Magistro darbas Recenzentas doc. dr. S. Maciulevičius 2010-05-31
ESENER įmonių apklausa: saugos ir sveikatos darbe valdymo, psichosocialinės rizikos ir darbuotojų dalyvavimo reikšmės supratimas
 LT Sauga ir sveikata darbe turi rūpintis visi. Tai naudinga jums. Tai naudinga verslui. ESENER įmonių apklausa: saugos ir sveikatos darbe valdymo, psichosocialinės rizikos ir darbuotojų dalyvavimo reikšmės
LT Sauga ir sveikata darbe turi rūpintis visi. Tai naudinga jums. Tai naudinga verslui. ESENER įmonių apklausa: saugos ir sveikatos darbe valdymo, psichosocialinės rizikos ir darbuotojų dalyvavimo reikšmės
Netradicinės mokyklos organizavimo alternatyvos
 WW-06178 1993 Netradicinės mokyklos organizavimo alternatyvos Pagal Lisos Hinz leidinį Teigiamos kryptys mokykloms ir bendruomenėms (angl. Positive Directions for Schools and Communities) Dėl mažėjančio
WW-06178 1993 Netradicinės mokyklos organizavimo alternatyvos Pagal Lisos Hinz leidinį Teigiamos kryptys mokykloms ir bendruomenėms (angl. Positive Directions for Schools and Communities) Dėl mažėjančio
1. Bendrosios nuostatos
 TECHNINIO REGLAMENTO MAŠINŲ SAUGA REIKALAVIMŲ TAIKYMO AIŠKINIMAS 1. Bendrosios nuostatos 1.1 Techninio reglamento Mašinų sauga reikalavimų taikymo aiškinimai (toliau aiškinimai) parengti vykdant Socialinės
TECHNINIO REGLAMENTO MAŠINŲ SAUGA REIKALAVIMŲ TAIKYMO AIŠKINIMAS 1. Bendrosios nuostatos 1.1 Techninio reglamento Mašinų sauga reikalavimų taikymo aiškinimai (toliau aiškinimai) parengti vykdant Socialinės
POLITIKOS GAIRĖS INKLIUZINIAM ŠVIETIMUI DIEGTI. Rodiklių parengimo iššūkiai ir galimybės
 POLITIKOS GAIRĖS INKLIUZINIAM ŠVIETIMUI DIEGTI Rodiklių parengimo iššūkiai ir galimybės Projekte, pavadintame Politikos gairės inkliuziniam š vietimui diegti (angl. Mapping the Implementation of Policy
POLITIKOS GAIRĖS INKLIUZINIAM ŠVIETIMUI DIEGTI Rodiklių parengimo iššūkiai ir galimybės Projekte, pavadintame Politikos gairės inkliuziniam š vietimui diegti (angl. Mapping the Implementation of Policy
TEORINĖ METODINĖ MEDŽIAGA PAGRINDINIO UGDYMO PASIEKIMŲ PATIKRINIMO (PUPP) IR BRANDOS EGZAMINŲ (BE) UŽDUOČIŲ RENGĖJAMS
 IR BRANDOS EGZAMINŲ (BE) UŽDUOČIŲ RENGĖJAMS") Nacionalinis egzaminų centras Projektas Pagrindinio ugdymo pasiekimų patikrinimo ir brandos egzaminų sistemos tobulinimas (SFMIS VP1-2.1-ŠMM-01-V-01-002) TEORINĖ METODINĖ MEDŽIAGA PAGRINDINIO UGDYMO PASIEKIMŲ
Nacionalinis egzaminų centras Projektas Pagrindinio ugdymo pasiekimų patikrinimo ir brandos egzaminų sistemos tobulinimas (SFMIS VP1-2.1-ŠMM-01-V-01-002) TEORINĖ METODINĖ MEDŽIAGA PAGRINDINIO UGDYMO PASIEKIMŲ
MAGISTRO DARBO RAŠYMO METODIKA
 VILNIAUS UNIVERSITETAS EKONOMIKOS FAKULTETAS Apskaitos ir audito katedra MAGISTRO DARBO RAŠYMO METODIKA Vilnius, 2013 TURINYS 1. MAGISTRO STUDIJŲ STRUKTŪRA, BAIGIAMOJO DARBO PROJEKTO IR MAGISTRO DARBO
VILNIAUS UNIVERSITETAS EKONOMIKOS FAKULTETAS Apskaitos ir audito katedra MAGISTRO DARBO RAŠYMO METODIKA Vilnius, 2013 TURINYS 1. MAGISTRO STUDIJŲ STRUKTŪRA, BAIGIAMOJO DARBO PROJEKTO IR MAGISTRO DARBO
INFORMACINĖS SISTEMOS MEDICINOJE
 Julius Griškevičius Romualdas J. Kizlaitis INFORMACINĖS SISTEMOS MEDICINOJE Projekto kodas VP1-2.2-ŠMM 07-K-01-023 Studijų programų atnaujinimas pagal ES reikalavimus, gerinant studijų kokybę ir taikant
Julius Griškevičius Romualdas J. Kizlaitis INFORMACINĖS SISTEMOS MEDICINOJE Projekto kodas VP1-2.2-ŠMM 07-K-01-023 Studijų programų atnaujinimas pagal ES reikalavimus, gerinant studijų kokybę ir taikant
MEDIJŲ IR INFORMACINIS RAŠTINGUMAS LIETUVOJE: LAIKAS KEISTI POŽIŪRĮ?
 PROBLEMOS ANALIZĖ ŠVIETIMO 2014 spalis, Nr. 9 (114) ISSN 1822-4156 Pagrindiniai klausimai: Kas yra medijų ir informacinis? Kaip sekasi ugdytis medijų ir informacinį raštingumą Lietuvos mokyklose? Į ką
PROBLEMOS ANALIZĖ ŠVIETIMO 2014 spalis, Nr. 9 (114) ISSN 1822-4156 Pagrindiniai klausimai: Kas yra medijų ir informacinis? Kaip sekasi ugdytis medijų ir informacinį raštingumą Lietuvos mokyklose? Į ką
OAT DRYING USING MOBILE AIR HEATING SOLAR COLLECTOR AVIŽŲ DŽIOVINIMAS NAUDOJANT MOBILŲ ORO ŠILDYMO SAULĖS KOLEKTORIŲ
 ISSN 1392-1134 Žemės ūkio inžinerija, Mokslo darbai, 2013, 45(3), 6 12 p. Agricultural Engineering, Research Papers, 2013, Vol. 45, No 3, 6 12 p. OAT DRYING USING MOBILE AIR HEATING SOLAR COLLECTOR AVIŽŲ
ISSN 1392-1134 Žemės ūkio inžinerija, Mokslo darbai, 2013, 45(3), 6 12 p. Agricultural Engineering, Research Papers, 2013, Vol. 45, No 3, 6 12 p. OAT DRYING USING MOBILE AIR HEATING SOLAR COLLECTOR AVIŽŲ
3.1 priemonė. Aktualių tendencijų
 3.1 priemonė. Aktualių tendencijų nustatymo gidas Toliau pateikiama keletas švietimo technologijų ir praktikos tendencijų. Kiekviena jų turi bent vieną nuorodą į tinklalapį, kurie gali būti kaip geras
3.1 priemonė. Aktualių tendencijų nustatymo gidas Toliau pateikiama keletas švietimo technologijų ir praktikos tendencijų. Kiekviena jų turi bent vieną nuorodą į tinklalapį, kurie gali būti kaip geras
MOKYKLŲ FIZINĖS APLINKOS IR UGDYMO NUOSTATŲ SĄSAJŲ TYRIMAI
 MOKSLAS LIETUVOS ATEITIS SCIENCE FUTURE OF LITHUANIA ISSN 2029-2341 / eissn 2029-2252 http://www.mla.vgtu.lt K. ŠEŠELGIO SKAITYMAI 2016 K. ŠEŠELGIS' READINGS 2016 2016 8(1): 112 122 http://dx.doi.org/10.3846/mla.2016.873
MOKSLAS LIETUVOS ATEITIS SCIENCE FUTURE OF LITHUANIA ISSN 2029-2341 / eissn 2029-2252 http://www.mla.vgtu.lt K. ŠEŠELGIO SKAITYMAI 2016 K. ŠEŠELGIS' READINGS 2016 2016 8(1): 112 122 http://dx.doi.org/10.3846/mla.2016.873
ELEKTRONINIO VERSLO INFORMACINöS SISTEMOS
 MYKOLO ROMERIO UNIVERSITETAS ELEKTRONINIO VERSLO INFORMACINöS SISTEMOS PASKAITŲ KONSPEKTAS Prof. Rimantas PETRAUSKAS Lekt. Konstantin AGAFONOV Lekt. Rimgaudas GAMULIS Vilnius, 2008 TURINYS 1 tema. Verslo
MYKOLO ROMERIO UNIVERSITETAS ELEKTRONINIO VERSLO INFORMACINöS SISTEMOS PASKAITŲ KONSPEKTAS Prof. Rimantas PETRAUSKAS Lekt. Konstantin AGAFONOV Lekt. Rimgaudas GAMULIS Vilnius, 2008 TURINYS 1 tema. Verslo
VILNIAUS UNIVERSITETAS EKONOMIKOS FAKULTETAS VADYBOS KATEDRA. Indrė PATAPIENĖ Kokybės vadybos programa
 VILNIAUS UNIVERSITETAS EKONOMIKOS FAKULTETAS VADYBOS KATEDRA Indrė PATAPIENĖ Kokybės vadybos programa MAGISTRO DARBAS KOKYBĖS VADYBOS SISTEMŲ INTEGRACIJA Į ORGANIZACIJOS VALDYMĄ QUALITY MANAGEMENT SYSTEMS
VILNIAUS UNIVERSITETAS EKONOMIKOS FAKULTETAS VADYBOS KATEDRA Indrė PATAPIENĖ Kokybės vadybos programa MAGISTRO DARBAS KOKYBĖS VADYBOS SISTEMŲ INTEGRACIJA Į ORGANIZACIJOS VALDYMĄ QUALITY MANAGEMENT SYSTEMS
TVARKARAŠČIŲ ANALIZĖS IR SUDARYMO SISTEMA
 KAUNO TECHNOLOGIJOS UNIVERSITETAS INFORMATIKOS FAKULTETAS INFORMACIJOS SISTEMŲ KATEDRA Linas Ūselis TVARKARAŠČIŲ ANALIZĖS IR SUDARYMO SISTEMA Magistro darbas Vadovas prof. B. Paradauskas KAUNAS, 2008 KAUNO
KAUNO TECHNOLOGIJOS UNIVERSITETAS INFORMATIKOS FAKULTETAS INFORMACIJOS SISTEMŲ KATEDRA Linas Ūselis TVARKARAŠČIŲ ANALIZĖS IR SUDARYMO SISTEMA Magistro darbas Vadovas prof. B. Paradauskas KAUNAS, 2008 KAUNO
INOVATYVIŲ MOKYMO (-SI) METODŲ IR IKT TAIKYMAS I KNYGA
 METODŲ IR IKT TAIKYMAS I KNYGA") INOVATYVIŲ MOKYMO (-SI) METODŲ IR IKT TAIKYMAS I KNYGA INOVATYVIŲ MOKYMO (-SI) METODŲ IR IKT TAIKYMAS I KNYGA Metodinė priemonė pradinių klasių mokytojams ir specialiesiems pedagogams Ugdymo plėtotės
INOVATYVIŲ MOKYMO (-SI) METODŲ IR IKT TAIKYMAS I KNYGA INOVATYVIŲ MOKYMO (-SI) METODŲ IR IKT TAIKYMAS I KNYGA Metodinė priemonė pradinių klasių mokytojams ir specialiesiems pedagogams Ugdymo plėtotės
KOKYBĖS VADYBOS DIEGIMAS ORGANIZACIJOJE: ŽMOGIŠKASIS ASPEKTAS
 KOKYBĖS VADYBOS DIEGIMAS ORGANIZACIJOJE: ŽMOGIŠKASIS ASPEKTAS Audrius Mickaitis 1, Gintarė Zaščižinskienė 2, Tautis Pasvenskas 3 Vilniaus universiteto Kauno humanitarinis fakultetas, Lietuva 1 buriuok@gmail.com.,
KOKYBĖS VADYBOS DIEGIMAS ORGANIZACIJOJE: ŽMOGIŠKASIS ASPEKTAS Audrius Mickaitis 1, Gintarė Zaščižinskienė 2, Tautis Pasvenskas 3 Vilniaus universiteto Kauno humanitarinis fakultetas, Lietuva 1 buriuok@gmail.com.,
RIZIKOS VERTINIMAS EKSTREMALIŲ SITUACIJŲ VALDYME
 ISSN 1648-9098 Ekonomika ir vadyba: aktualijos ir perspektyvos. 2008. 3 (12). 231-242 RIZIKOS VERTINIMAS EKSTREMALIŲ SITUACIJŲ VALDYME Birutė Pitrėnaitė Mykolo Romerio universitetas Anotacija Straipsnyje
ISSN 1648-9098 Ekonomika ir vadyba: aktualijos ir perspektyvos. 2008. 3 (12). 231-242 RIZIKOS VERTINIMAS EKSTREMALIŲ SITUACIJŲ VALDYME Birutė Pitrėnaitė Mykolo Romerio universitetas Anotacija Straipsnyje
BAKALAURO STUDIJŲ BAIGIAMASIS DARBAS
 LIETUVOS ŽEMĖS ŪKIO UNIVERSITETAS Vandens ūkio ir žemėtvarkos fakultetas Algis Kvaraciejus, Laima Taparauskienė, Gražina Žibienė BAKALAURO STUDIJŲ BAIGIAMASIS DARBAS Metodiniai patarimai aplinkos inžinerijos
LIETUVOS ŽEMĖS ŪKIO UNIVERSITETAS Vandens ūkio ir žemėtvarkos fakultetas Algis Kvaraciejus, Laima Taparauskienė, Gražina Žibienė BAKALAURO STUDIJŲ BAIGIAMASIS DARBAS Metodiniai patarimai aplinkos inžinerijos
2013 m. kovo 12 d. Nr. 3 (1423)
") 2013 m. kovo 12 d. Nr. 3 (1423) Kovo 8 d. Vilniaus Gedimino technikos universitete vyko Lietuvos Nepriklausomybės atkūrimo dienos minėjimas. Į iškilmingą Kovo11-osios minėjimą atvyko ir LR Seimo Pirmininkas
2013 m. kovo 12 d. Nr. 3 (1423) Kovo 8 d. Vilniaus Gedimino technikos universitete vyko Lietuvos Nepriklausomybės atkūrimo dienos minėjimas. Į iškilmingą Kovo11-osios minėjimą atvyko ir LR Seimo Pirmininkas
Vilniaus universitetas Matematikos ir informatikos fakultetas Matematikos ir informatikos metodikos katedra El. paštas:
 INFORMACINöS MOKYMO TECHNOLOGIJOS Mokymo priemon magistrantūros studijų programos Matematikos ir informatikos d stymas studentams Valentina Dagien Vilniaus universitetas Matematikos ir informatikos fakultetas
INFORMACINöS MOKYMO TECHNOLOGIJOS Mokymo priemon magistrantūros studijų programos Matematikos ir informatikos d stymas studentams Valentina Dagien Vilniaus universitetas Matematikos ir informatikos fakultetas
Atraskime Supraskime Panaudokime
 mūsų gyvenimą. Kuo tai gali būti naudinga man ir RFIDužvaldo mano verslui? Radijo dažnio identifikavimo technologija Galiniame lape rasite kvietimą į konferenciją Informacinis leidinys apie RFID technologiją
mūsų gyvenimą. Kuo tai gali būti naudinga man ir RFIDužvaldo mano verslui? Radijo dažnio identifikavimo technologija Galiniame lape rasite kvietimą į konferenciją Informacinis leidinys apie RFID technologiją
KAUNO TECHNOLOGIJOS UNIVERSITETAS EKONOMIKOS IR VERSLO FAKULTETAS MAGISTRO DARBAS
 KAUNO TECHNOLOGIJOS UNIVERSITETAS EKONOMIKOS IR VERSLO FAKULTETAS RAIMONDAS BERNOTAS VALSTYBINIŲ ĮMONIŲ EFEKTYVUMO VERTINIMO PRIELAIDOS MAGISTRO DARBAS Darbo vadovas lekt. dr. Vitalija Venckuvienė KAUNAS
KAUNO TECHNOLOGIJOS UNIVERSITETAS EKONOMIKOS IR VERSLO FAKULTETAS RAIMONDAS BERNOTAS VALSTYBINIŲ ĮMONIŲ EFEKTYVUMO VERTINIMO PRIELAIDOS MAGISTRO DARBAS Darbo vadovas lekt. dr. Vitalija Venckuvienė KAUNAS
ĮMONIŲ IR PRAMONĖS GENERALINIS DIREKTORATAS MIKROĮMONĖS VIDURINIAME MOKYME GERIAUSIOS PROCEDŪROS PROJEKTAS: GALUTINĖ EKSPERTŲ GRUPĖS ATASKAITA
 ĮMONIŲ IR PRAMONĖS GENERALINIS DIREKTORATAS MIKROĮMONĖS VIDURINIAME MOKYME GERIAUSIOS PROCEDŪROS PROJEKTAS: GALUTINĖ EKSPERTŲ GRUPĖS ATASKAITA EUROPOS KOMISIJA ĮMONIŲ IR PRAMONĖS GENERALINIS DIREKTORATAS
ĮMONIŲ IR PRAMONĖS GENERALINIS DIREKTORATAS MIKROĮMONĖS VIDURINIAME MOKYME GERIAUSIOS PROCEDŪROS PROJEKTAS: GALUTINĖ EKSPERTŲ GRUPĖS ATASKAITA EUROPOS KOMISIJA ĮMONIŲ IR PRAMONĖS GENERALINIS DIREKTORATAS
Nijolė Jurkšaitienė, Donatas Misiūnas
 Optimization of ornamental and garden plant assortment, technologies and environment. Scientific articles. 2013 (4) 9. ISSN 2029-1906, ISSN 2335-7282 (online) Socialinių mokslų sritis STUDIJŲ IR DARBO
Optimization of ornamental and garden plant assortment, technologies and environment. Scientific articles. 2013 (4) 9. ISSN 2029-1906, ISSN 2335-7282 (online) Socialinių mokslų sritis STUDIJŲ IR DARBO
ALYTAUS KOLEGIJA AK SAVARANKIŠKŲ IR BAIGIAMŲJŲ DARBŲ RENGIMO METODINIAI REIKALAVIMAI
 ALYTAUS KOLEGIJA AK SAVARANKIŠKŲ IR BAIGIAMŲJŲ DARBŲ RENGIMO METODINIAI REIKALAVIMAI ALYTUS, 2014 TURINYS PRATARMĖ...3 1. STUDIJŲ RAŠTO DARBŲ RŪŠYS...4 2. BAIGIAMASIS DARBAS...5 3. BENDRIEJI RAŠTO DARBŲ
ALYTAUS KOLEGIJA AK SAVARANKIŠKŲ IR BAIGIAMŲJŲ DARBŲ RENGIMO METODINIAI REIKALAVIMAI ALYTUS, 2014 TURINYS PRATARMĖ...3 1. STUDIJŲ RAŠTO DARBŲ RŪŠYS...4 2. BAIGIAMASIS DARBAS...5 3. BENDRIEJI RAŠTO DARBŲ
N LIGONINĖS MEDICINOS PERSONALO POŽIŪRIO Į KOMANDINĮ DARBĄ VERTINIMAS
 LIETUVOS SVEIKATOS MOKSLŲ UNIVERSITETAS Visuomenės sveikatos fakultetas Sveikatos vadybos katedra Grita Balašaitienė N LIGONINĖS MEDICINOS PERSONALO POŽIŪRIO Į KOMANDINĮ DARBĄ VERTINIMAS MAGISTRO DIPLOMINIS
LIETUVOS SVEIKATOS MOKSLŲ UNIVERSITETAS Visuomenės sveikatos fakultetas Sveikatos vadybos katedra Grita Balašaitienė N LIGONINĖS MEDICINOS PERSONALO POŽIŪRIO Į KOMANDINĮ DARBĄ VERTINIMAS MAGISTRO DIPLOMINIS
VILNIAUS UNIVERSITETAS KAUNO HUMANITARINIS FAKULTETAS INFORMATIKOS KATEDRA
 VILNIAUS UNIVERSITETAS KAUNO HUMANITARINIS FAKULTETAS INFORMATIKOS KATEDRA VERSLO INFORMACINIŲ SISTEMŲ STUDIJŲ PROGRAMA Kodas 62103S138 ARTURAS MIKLOVAS MAGISTRO BAIGIAMASIS DARBAS INDIKATORIŲ RINKINIO
VILNIAUS UNIVERSITETAS KAUNO HUMANITARINIS FAKULTETAS INFORMATIKOS KATEDRA VERSLO INFORMACINIŲ SISTEMŲ STUDIJŲ PROGRAMA Kodas 62103S138 ARTURAS MIKLOVAS MAGISTRO BAIGIAMASIS DARBAS INDIKATORIŲ RINKINIO
KAUNO TECHNOLOGIJOS UNIVERSITETAS EKONOMIKOS IR VERSLO FAKULTETAS
 KAUNO TECHNOLOGIJOS UNIVERSITETAS EKONOMIKOS IR VERSLO FAKULTETAS Edgaras Zemlevičius ŠILUMOS ŪKIO EKONOMINĖ ANALIZĖ IR VERTINIMAS MAGISTRO DARBAS Darbo vadovas: Gitana Valodkienė KAUNAS 2015 KAUNO TECHNOLOGIJOS
KAUNO TECHNOLOGIJOS UNIVERSITETAS EKONOMIKOS IR VERSLO FAKULTETAS Edgaras Zemlevičius ŠILUMOS ŪKIO EKONOMINĖ ANALIZĖ IR VERTINIMAS MAGISTRO DARBAS Darbo vadovas: Gitana Valodkienė KAUNAS 2015 KAUNO TECHNOLOGIJOS
Aleksandras Targamadzė. Technologijomis grįsto mokymosi priemonės ir sistemos
 Aleksandras Targamadzė Technologijomis grįsto mokymosi priemonės ir sistemos Aleksandras Targamadzė TECHNOLOGIJOMIS GRĮSTO MOKYMOSI PRIEMONĖS IR SISTEMOS Recenzavo: doc. dr. R. Marcinkevičius dr. A. Lopata
Aleksandras Targamadzė Technologijomis grįsto mokymosi priemonės ir sistemos Aleksandras Targamadzė TECHNOLOGIJOMIS GRĮSTO MOKYMOSI PRIEMONĖS IR SISTEMOS Recenzavo: doc. dr. R. Marcinkevičius dr. A. Lopata
Android Controlled Fire Fighting Robot
 IJSTE - International Journal of Science Technology & Engineering Volume 3 Issue 09 March 2017 ISSN (online): 2349-784X Android Controlled Fire Fighting Robot S. Sakthi Priyanka R. Sangeetha Department
IJSTE - International Journal of Science Technology & Engineering Volume 3 Issue 09 March 2017 ISSN (online): 2349-784X Android Controlled Fire Fighting Robot S. Sakthi Priyanka R. Sangeetha Department
ERGONOMINIŲ RIZIKOS VEIKSNIŲ TYRIMAS KOMERCINĖJE ĮMONĖJE
 ERGONOMINIŲ RIZIKOS VEIKSNIŲ TYRIMAS KOMERCINĖJE ĮMONĖJE Algirdas Giedraitis 1 Klaipėdos universitetas (Lietuva) ANOTACIJA Straipsnyje pažymimas nepakankamas įmonės vadovų dėmesys darbuotojų darbo sąlygoms
ERGONOMINIŲ RIZIKOS VEIKSNIŲ TYRIMAS KOMERCINĖJE ĮMONĖJE Algirdas Giedraitis 1 Klaipėdos universitetas (Lietuva) ANOTACIJA Straipsnyje pažymimas nepakankamas įmonės vadovų dėmesys darbuotojų darbo sąlygoms
Lietuvos Respublikos energetikos ministerija. Ataskaita gruodis
 Lietuvos Respublikos energetikos ministerija Taikomasis mokslinis tyrimas Nacionalinės energijos vartojimo efektyvumo didinimo 2006 2010 metų programos įgyvendinimo analizė ir pasiūlymų dėl šios programos
Lietuvos Respublikos energetikos ministerija Taikomasis mokslinis tyrimas Nacionalinės energijos vartojimo efektyvumo didinimo 2006 2010 metų programos įgyvendinimo analizė ir pasiūlymų dėl šios programos
Team Rescue X: Autonomous Firefighting Robot
 Team Rescue X: Autonomous Firefighting Robot Team Members Project Manager: Shervin Haghgouy Parts Manager: Shervin Nikravesh Website Designer: Vincent Thomas Repository Manager: Alexander Camp Report Editor:
Team Rescue X: Autonomous Firefighting Robot Team Members Project Manager: Shervin Haghgouy Parts Manager: Shervin Nikravesh Website Designer: Vincent Thomas Repository Manager: Alexander Camp Report Editor:
KAUNO TECHNOLOGIJOS UNIVERSITETAS EKONOMIKOS IR VERSLO FAKULTETAS STRATEGINIO VALDYMO KATEDRA MAGISTRO DARBAS
 KAUNO TECHNOLOGIJOS UNIVERSITETAS EKONOMIKOS IR VERSLO FAKULTETAS STRATEGINIO VALDYMO KATEDRA Rūta Katilienė NAUJŲ PASLAUGŲ KŪRIMAS IR VYSTYMAS UAB A4U MAGISTRO DARBAS Darbo vadovė: Dr. N. Langvinienė
KAUNO TECHNOLOGIJOS UNIVERSITETAS EKONOMIKOS IR VERSLO FAKULTETAS STRATEGINIO VALDYMO KATEDRA Rūta Katilienė NAUJŲ PASLAUGŲ KŪRIMAS IR VYSTYMAS UAB A4U MAGISTRO DARBAS Darbo vadovė: Dr. N. Langvinienė
MOKINIŲ UGDYMO(SI) AKTYVINIMAS: KODINIŲ UŽDUOČIŲ TAIKYMAS GEOGRAFIJOS PAMOKOSE
 AKTYVINIMAS: KODINIŲ UŽDUOČIŲ TAIKYMAS GEOGRAFIJOS PAMOKOSE") MOKINIŲ UGDYMO(SI) AKTYVINIMAS: KODINIŲ UŽDUOČIŲ TAIKYMAS GEOGRAFIJOS PAMOKOSE Anotacija Laima Railienė Gamtamokslinio ugdymo tyrimų centras, Šiaulių universitetas, Lietuva Vienas optimalių būdų ar galimybių
MOKINIŲ UGDYMO(SI) AKTYVINIMAS: KODINIŲ UŽDUOČIŲ TAIKYMAS GEOGRAFIJOS PAMOKOSE Anotacija Laima Railienė Gamtamokslinio ugdymo tyrimų centras, Šiaulių universitetas, Lietuva Vienas optimalių būdų ar galimybių
Recenzentai: prof. dr. Irena Bakanauskienė prof. dr. Nijolė Petkevičiūtė
 Recenzentai: prof. dr. Irena Bakanauskienė prof. dr. Nijolė Petkevičiūtė Svarstyta Vytauto Didžiojo universiteto EVF Vadybos katedros posėdyje 2009-11-18 (protokolo Nr. 06); EVF fakulteto tarybos posėdyje
Recenzentai: prof. dr. Irena Bakanauskienė prof. dr. Nijolė Petkevičiūtė Svarstyta Vytauto Didžiojo universiteto EVF Vadybos katedros posėdyje 2009-11-18 (protokolo Nr. 06); EVF fakulteto tarybos posėdyje
Implementation of Auto Car Washing System Using Two Robotic Arms
 Implementation of Auto Car Washing System Using Two Robotic Arms Pranoti Utekar 1, Sayali Naik 2, Monika Wadekar 3, S.G. Watve 4 U.G. Students, Department of Electronics and Telecommunication Engineering,
Implementation of Auto Car Washing System Using Two Robotic Arms Pranoti Utekar 1, Sayali Naik 2, Monika Wadekar 3, S.G. Watve 4 U.G. Students, Department of Electronics and Telecommunication Engineering,
LEGO, the LEGO logo are trademarks of the LEGO Group Burglar Alarm
 Burglar Alarm Burglar Alarm Introduction With LEGO MINDSTORMS Education students can build robots and use software to plan, test and modify sequences of instructions from a variety of real life robotic
Burglar Alarm Burglar Alarm Introduction With LEGO MINDSTORMS Education students can build robots and use software to plan, test and modify sequences of instructions from a variety of real life robotic
Suaugusiųjų auditorijos valdymas pasitelkiant neverbalinę komunikaciją Adult audience management with a help of non-verbal communication
 VYTAUTO DIDŽIOJO UNIVERSITETAS SOCIALINIŲ MOKSLŲ FAKULTETAS EDUKOLOGIJOS KATEDRA Lina Nikitinaitė Suaugusiųjų auditorijos valdymas pasitelkiant neverbalinę komunikaciją Adult audience management with a
VYTAUTO DIDŽIOJO UNIVERSITETAS SOCIALINIŲ MOKSLŲ FAKULTETAS EDUKOLOGIJOS KATEDRA Lina Nikitinaitė Suaugusiųjų auditorijos valdymas pasitelkiant neverbalinę komunikaciją Adult audience management with a
KAUNO TECHNOLOGIJOS UNIVERSITETAS EKONOMIKOS IR VERSLO FAKULTETAS MAGISTRO DARBAS
 KAUNO TECHNOLOGIJOS UNIVERSITETAS EKONOMIKOS IR VERSLO FAKULTETAS Eduardas Jegelavičius VERSLO VERTINIMO METODO PARINKIMO MODELIS MAGISTRO DARBAS Darbo vadovė doc. dr. Alina Stundžienė KAUNAS, 2017 KAUNO
KAUNO TECHNOLOGIJOS UNIVERSITETAS EKONOMIKOS IR VERSLO FAKULTETAS Eduardas Jegelavičius VERSLO VERTINIMO METODO PARINKIMO MODELIS MAGISTRO DARBAS Darbo vadovė doc. dr. Alina Stundžienė KAUNAS, 2017 KAUNO
VADOVAS SENJORAMS KAIP NARŠYTI INTERNETE
 VADOVAS SENJORAMS KAIP NARŠYTI INTERNETE THIS PROJECT HAS BEEN FUNDED WITH SUPPORT FROM THE EUROPEAN COMMISSION. THIS PUBLICATION [COMMUNICATION] REFLECTS THE VIEWS ONLY OF THE AUTHOR, AND THE COMMISSION
VADOVAS SENJORAMS KAIP NARŠYTI INTERNETE THIS PROJECT HAS BEEN FUNDED WITH SUPPORT FROM THE EUROPEAN COMMISSION. THIS PUBLICATION [COMMUNICATION] REFLECTS THE VIEWS ONLY OF THE AUTHOR, AND THE COMMISSION
Tapatumas be stokos: trijų atminties vaizdinių apmąstymas
 KASDIENIŲ LAIKYSENŲ TYRIMAI M. Liugaitė-Černiauskienė. BALADĖ APIE BAUDŽIAMĄ DUKTERĮ... Tapatumas be stokos: trijų atminties vaizdinių apmąstymas JURGA JONUTYTĖ Vytauto Didžiojo universitetas ANOTACIJA.
KASDIENIŲ LAIKYSENŲ TYRIMAI M. Liugaitė-Černiauskienė. BALADĖ APIE BAUDŽIAMĄ DUKTERĮ... Tapatumas be stokos: trijų atminties vaizdinių apmąstymas JURGA JONUTYTĖ Vytauto Didžiojo universitetas ANOTACIJA.
VILNIAUS UNIVERSITETO VIDINĖ STUDIJŲ KOKYBĖS VADYBOS SISTEMA: IŠORINIO VERTINIMO ATASKAITA m. sausio 6 7 d., Vilnius
 VILNIAUS UNIVERSITETO VIDINĖ STUDIJŲ KOKYBĖS VADYBOS SISTEMA: IŠORINIO VERTINIMO ATASKAITA Ataskaitos pavadinimas Vilniaus universiteto vidinė studijų kokybės vadybos sistema: išorinio vertinimo ataskaita
VILNIAUS UNIVERSITETO VIDINĖ STUDIJŲ KOKYBĖS VADYBOS SISTEMA: IŠORINIO VERTINIMO ATASKAITA Ataskaitos pavadinimas Vilniaus universiteto vidinė studijų kokybės vadybos sistema: išorinio vertinimo ataskaita
Internete esančių duomenų apsauga
 PHARE PROGRAMME TWINNING PROJECT NO. LT02/IB-JH-02/-03 STRENGTHENING ADMINISTRATIVE AND TECHNICAL CAPACITY OF PERSONAL DATA PROTECTION GEDIMINO PR. 27/2, 01104 VILNIUS, LITHUANIA TEL.: +370 5 262 6516
PHARE PROGRAMME TWINNING PROJECT NO. LT02/IB-JH-02/-03 STRENGTHENING ADMINISTRATIVE AND TECHNICAL CAPACITY OF PERSONAL DATA PROTECTION GEDIMINO PR. 27/2, 01104 VILNIUS, LITHUANIA TEL.: +370 5 262 6516
KELIŲ STATINIŲ PROJEKTAVIMO IR PRIEŽIŪROS NORMATYVINIŲ DOKUMENTŲ SISTEMA
 KELIŲ STATINIŲ PROJEKTAVIMO IR PRIEŽIŪROS NORMATYVINIŲ DOKUMENTŲ SISTEMA Z. Kamaitis Vilniaus Gedimino technikos universitetas 1. Įvadas Kelių statiniai geležinkelio ir automobilių kelių, gatvių ir pėsčiųjų
KELIŲ STATINIŲ PROJEKTAVIMO IR PRIEŽIŪROS NORMATYVINIŲ DOKUMENTŲ SISTEMA Z. Kamaitis Vilniaus Gedimino technikos universitetas 1. Įvadas Kelių statiniai geležinkelio ir automobilių kelių, gatvių ir pėsčiųjų